









昨日のこの写真、青空がもう少しくっきりしてるといいんだがなぁ・・・と思って、C-PLフィルタがあるのを思い出し着けてみた。

これ、UVフィルターの上にねじ込まれていて取り外せない。両方ともする無タイプなので、力が掃いたない。仕方なしにIPAをネジのところに入れてやってみたがだめ。あとで綺麗に掃除するとしてシリコンを流し込んでみた。これでやっとネジが回って、また着けてみたら(緩く着けたつもり・・・)、バカですね・・・また外せなくなった。また同じようなことして・・・写真の前にこんなことがアルナンテ・・・

サーキュラータイプがどれだけ効くか,ファインダを覗きながら回して見たけど、はっきり良いポイントがつかめない。
そんなこんなで取ったのかこれ

比べて見て・・・・いくらか効果があったかな?



逆行はやっぱりダメですね・・・
テなことでGWも過ぎ去り、、、なんにもしなかった
以前はZB2L3とか目覚まし時計を使って放電特性を測っていたのですが、結構セッティング他方面倒くさい。それに比べてこっち

は、USB-Cをつないでスイッチを押すだけで測定が始まるので非常に便利。
ただただ、時間がかかります。

先日取りだしたmakita互換バッテリーのうち8本を測ってました。10本のうち1本は液漏れ。もう1本は過放電で1vにも満たない状態でした。
丸1日かけてもまだ終わらない感じ。でも、閑人なんでだらだら測ってました。

その結果がこれ。だいたい2000mAhくらいで、内部抵抗も低い。これでまだ何とか使えそうです。
この放電特性測定器は、電源を入れるとまずフル充電まで充電、その後放電が始まり容量を測定する仕組みになってます。いちおう2.7Vで終始させ、放っておくとまた充電が始まります(あれ・・・ENDで止まるのでは?・・・)。またフル充電まで時間がかかるので、他の充電器に回して別な電離を測定・・・という繰り返しでした。



この間、暇だったんでてなぐさみ

端材利用のミニスクレーパー

アルミ板の1mmではもったいないので、0.5mm。

ケチったらぺナぺナでした。先日作ったメモ帳の糊をのばす目的なんです。いらないクレジットカードで伸ばしたら、フニャフニャ仁なってしまったので、、、まあ力はいらないので、何とか使いましょう。
100均でも売ってるんですがね

厳寒期の物置、夜間灯油の補給用に天井にライトを付けていました。

はじめは24灯にIRセンサをつけて、

18650のリチウム電池2本並列で5Vに昇圧して使っていたのですが、だんだん調子が悪くなって点かなくなってきました。

電池の方は、多少の防寒対策をして、数ヶ月持っていたと思うので、そろそろセンサーかと思って新調することに。
自作も考えたのですが、ちょうど在庫を探したら、単四3本使用ですが、カワイイセンサーライトがあったので取り出してみました。

こんなものですが、単四では寒い物置に使うにはどうかなと思って先の18650並列の電池パックを使うようにしました。
古い24灯のものとほぼ同じくらいの明るさがあるのです。最近のCOBライトはすごい!

と、当初は調子よく動作していたのですが、しばらく経って灯油の補給に行ったら点かない。
室内に持ってきていろいろ調べたのですが、どうも電池の劣化らしい。何度か室内で充電してまた設置したのですが、すぐの電池がダメになる。新品ではなけれど、電池を別なものに交換しても同様にすぐ電圧が下がる。確かにセンサー用に常時電流は03mA程度140mA程度(居酒屋ガレージさんよりデータいただき)流れていますが、それにしても・・・
面倒くさくなってそのままほったらかしにして、手許ライトでしのいでいました。
このセンサライトは、裏に電池入れればそのまま使える。単4電池ではすぐに電池は終わるかもしれないけれど、ちょっとお試ししてみたい。ってことで330円の出費。

こんな風に2つ並べて実験。左側は18650電源で、右は後ろに単四3本入ってます(ニッ水3本)。左はカバーをどこかに無くしてしまって裸です。
数日後、左が点きません。(写真は撮り忘れました)
また左を外して電池を確認したら、なんと1.2Vまで落ち込んでいます。(これも写真撮り忘れ)。完全に過放電。廃棄するしかないか・・・
雪が降ったので、かなり寒かったことは事実。電池も氷のように冷たくなってます。それにしてもなあ~
しばらく室温で暖めて再度電圧を測ったら2.5Vくらいに回復している。暖めすぎてのリチウムイオンはダメなので、しばらく室温(19℃くらい)で暖めてから、充電を試みました。
はじめは全然充電器が受け付けなかったのですが、暖まってきたらどういうわけか充電できます。

そこで、容量を量ってみました。

この絵はディスチャージが始まってるところ。

2000mAくらいになってます。そんなに劣化はしてないみたい。(ステータスがENDになってないのはワタシがまたチャージボタンを押しちゃったせいです。)
もう一方も

とまあ、、、1900mA程度にはなってますね。これならまだ使えるか・・・
リチウムイオンは比較的寒さに強いと聞いていたのですが、この電池の場合は、ニッケル水素の軍配が上がりました。
18650、新品ならどうかなと思いますが、手持ちはみな古い10数年前の廃棄ノートPCからとりだしたもの。たぶん寒さに弱いのは古いせいなんでしょうね・・・
バッテリーの化学変化等には疎いので、実際はどうなのかご教示いただければ幸い。
なお、リチウムイオン電池については
Google検索から
AI による概要
リチウムイオン電池は低温環境下では性能が低下しやすく、0℃近くでは使用できなくなる可能性があります。
【低温環境でのリチウムイオン電池の特性】
○ 内部抵抗が増加し、放電容量が減少する
○ 内部で発生する化学反応が遅くなる
○ 電解質が凍結して電池セルに損傷を与える可能性がある
○ 最悪の場合、火災発生の可能性がある
【リチウムイオン電池の低温特性の改善】
○ 負極の表面構造を特殊な形状の炭素系材料にすることで、低温下でも性能を維持できるようになる
【リチウムイオン電池の保管とメンテナンス】
○ 危険を最小限に抑え、性能を最適化するために、リチウムイオン電池は暖かい環境で保管し、電池の適切なメンテナンスを行うことが必須です
【リチウムイオン電池の温度による影響】
○ 高温状態でも、充電池の性能は落ちてしまう
○ 冬場、特に気温が10℃を下回ると、バッテリーの内部で化学反応が遅くなり、エネルギーの供給効率が悪化します
寒冷地におけるリチウムイオン電池の性能
5℃以下に周囲温度が下がると、リチウムイオン電池の内部抵抗が増加し、放電容量が減少します。
これは、リチウムイオン電池内部の化学反応が低温では遅くなることに起因します。
また、リチウムイオン電池の電解質は非常に低い温度で凍結する可能性があり、電池セルに損傷を与える可能性があります。
最悪の場合、火災発生の可能性があります。
ポータブルパワーがリチウムイオンバッテリーを採用していない理由
パーソナルエナジーポータブルパワー、無瞬停可搬型オフグリッド電源 HPP-2000、バッテリーバンクHBB-1000に内蔵されるバッテリーにはAGM(アブソード・グラスマット)バッテリーを採用しています。
一般的に電池そのものが寒さに弱いことは了解しているのですが、アルカリ電池等から比べるとリチウムイオンの方が耐寒特性は優れていると認識でした。
AIより
リチウムイオン電池は耐寒性がありますか?
一般的に、リチウムイオン充電池やリチウムポリマー充電池は-20℃の環境下でも使用可能といわれています。 アルカリ乾電池と比較して、寒さに強いと言えるでしょう。 しかしながら、ジェントスではライトの正常な作動のため、周囲温度5~35℃以内での使用を推奨しています。
マイナス20℃にはなってないでしょうが、いずれにしろ過酷な使い方をしていることは事実です。
さて、ニッ水単四電池は何処まで保つか!
最近の灯油ポンプも単三電池とか使われてますよね。このポンプも厳寒の物置においてある。それでもひと@冬に1回くらいの電池交換で清んでします。18650のような容量がなくても良いのかなと思い始めてます・・・・
このところ寒い日が続きましたので、2月のCCAを測ってみました。x

ROCKY

NBOXは バッテリーを新規の交換したばかりですので、測りませんでした。それに朝測る前に乗り出しているので、ひと晩おいたデータが調べられません。




この写真、灰色テープで留めてあるのが、デサルフェータ。
5年経ってますが、データでは劣化が進んでいるものの、日常使いには全く問題ありません。
突然死もあるかもですが、まだまだ使います。
NETがつながらない合間のチョコッと工作

元旦のご挨拶のアップしたらすぐにブログを開けなくなりました。DDoSのサイバー攻撃を受けたようで,goo関係のサイトはまったくだめ。今日になってやっと,これまでどおりにアクセスできるようになりました。

NTT関係はすべてダウン

今頃(今日)になって・・・・・
元旦から昨日まで来客やら帰省した娘や孫どもやら、応対しながらひまを見ては作業室に籠もって細々と工作してました。

まずは1300円のキーボードが壊れたことは暮れに報告(下の方),これはみなバラして切り刻んでプラスチックゴミとして袋に入れたのですが,これに付いていたレシーバ,周波数の変更等は自分ではできないので,捨てようかと思ったのですが,今回は何か活用できないか考えて見ました。

おしりの黒いプラ部分を引っ張ると中身が抜けます。白いプラ部分が台座でUSBの端子の固定をしてるところ。基板は発信用ICとかがついている。

レシーバとしては使えないので,この端子部分を利用して電源を引っ張り出そうと考えました。受信関係は取外し。四つのpinだけ生かします。
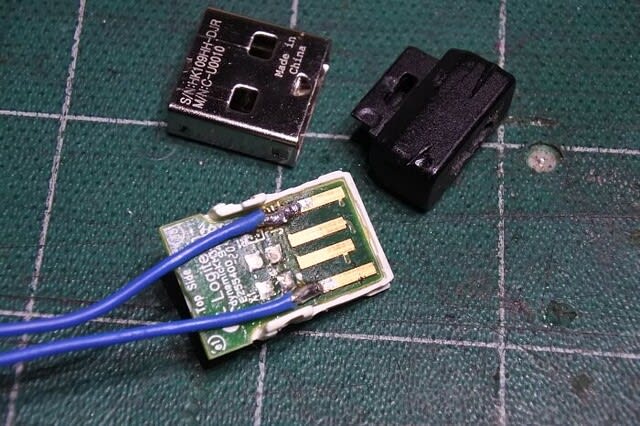
配線の+-を間違えないように,、、それとpinの後ろ側の配線をカットして短絡を防ぐ。

ケーブルはプラ部分に穴を開けて曳き出す。

あとは元に戻して完成

とまあ,USBから電源を取り出すパーツに変身できましたとさ・・・
******************************************************
で,もう一つ簡単工作

このセンサーライト,センサー用の電流は常時流れているので,単四3本なんで室内で使ってもすぐに電池が終わってしまう。これを物置用に使えないか考えてました。夜ヒータの灯油を入れに物置まで行くのですが,室内は暗くて作業し辛い。懐中電灯を持って行くのですが,両手をフリーにしたいということで、これをつけてみる。もちろん極寒のマイナスになるような環境ですので,このまま単四では使えない。外部電源でいいからリチウムが使えないか,取りあえずは手持ちのモバイルバッテリーがあるので,これを使ってみる。
ということでちょびっと工作。

コードはこのソケットから直接半田付けで取り抱いちゃおうかと思ったんですが,思い直して基板から

ソケットの裏から取り出し。

コードはおしりに穴を開けて

外形をそれほど壊さなくて済んだ

先のUSB端子を使って電気を引き出す。このバッテリーは微弱電流だと勝手に電気をカットしてしまうかも知れないが,取りあえずは間に合わせで。そのうち186502本くらいで5V電源作ります。

物置の天井に固定はマグネットでお気楽に。

取りあえずは動作しています。バッテリーの防寒対策を考えねば・・・
帰省してた娘どもの帰ったので,これからのんびり寝正月かな?
******************************************************
やっぱり駄目!!
物置にセットして三〇分後にまた行って動作を確認しました。でも点きません。
やはり微弱電流だと充電機器が接続されていないと判断され,スイッチが切れるようです。モバイルバッテリーは諦め。
作業室に戻って,18650を二本並列しして大昔に購入したダイソーの単三2本の昇圧充電器?の基板から5Vを取れるよにして組み直しました。ちょうどソケットも二つ有りました。

中身は撮り忘れ。プチプチに包んでみました

接続は取り外せるように左のような端子。(実はRCA・・・・ナイショ)

動作確認してまた物置に放り込んでおきました。幾日保つか・・・確認してから次の手を考えます。
logiとあるから多分ロジクール製のマウスなんだと思うけど、左クリックでチャタリングが頻発し,まただドラッグしても途中で途切れることが多くなっていました。

どうもムカシからの鼠形マウスが好きで,平べったいやつとかは結局使わなくなってます。
症状からどうも左のマイクロスイッチが疑わしいので,これを交換すればいいと,試みました。
マウスの定番マイクロスイッチは,OMRONのD2FCというのが定番で,たしか1年前に5個くらい買ったはずと,部品棚を家捜ししたのですが,どうにもこうにも出てこない。仕舞無くしってやつです。
ポッと思いついたのが,壊れたマウスのマイクロスイッチを移植する手。けっこう捨ててないのがあるはず。と,探し出したのがこれ(右の青)。


裏側に、ダイアルの動き▲とありますので,たぶんマイクロスイッチ部分は大丈夫だろうと,取り外します。



使う頻度が少ない右クリックの方を外しましょう。


オムロン製ではありませんが,大きさはぴったり。
logi側も外して交換。半田が僅少で半田吸い取り器ではなかなか吸わないので,半田を盛ってから吸い取ります。このくらいなら半田吸い取り線ンでもよかったかも。

外したスイッチの方も,このままですと仕舞い無くしそうですので,どうしよう・・・・

ボロマウスの方にくっつけておきました。仕舞い無くしたオムロンが出てきたら,再度交換します。どこかにあるはず!!

組み直しておしまい。かっちとしたクリック感(右も同じようだからいいか・・・)はイマイチですが,症状は治まってますので,今しばらくは使えそう。

ちょこっと工作でした。
ことによるとスケッチ(コンパイルはOKでしたが)が間違っているカモ?と思い、別なスケッチを入れてみました。
以下のよう
「基礎からのIoT入門」さんからいただきました
***********************************
const int DIR = 8; const int STEP = 9; void setup() { pinMode(DIR, OUTPUT); pinMode(STEP, OUTPUT); digitalWrite(DIR, LOW); digitalWrite(STEP, LOW); } void loop() { digitalWrite(DIR, HIGH); for (int i=0; i<200; i++) { digitalWrite(STEP, HIGH); delayMicroseconds(2000); digitalWrite(STEP, LOW); delayMicroseconds(2000); } delay(1000); digitalWrite(DIR, LOW); for (int i=0; i<200; i++) { digitalWrite(STEP, HIGH); delayMicroseconds(2000); digitalWrite(STEP, LOW); delayMicroseconds(2000); } delay(1000); } ***************************************************

だめ!! 動きませんね!ということは,A4988の基盤にエラーがあるのかな?
モーターが悪いのかな?A4988はまだ手持ちですので,切り分けてみたいと思います。
きょうはここまで。
クレの大掃除とかしなくては・・・・
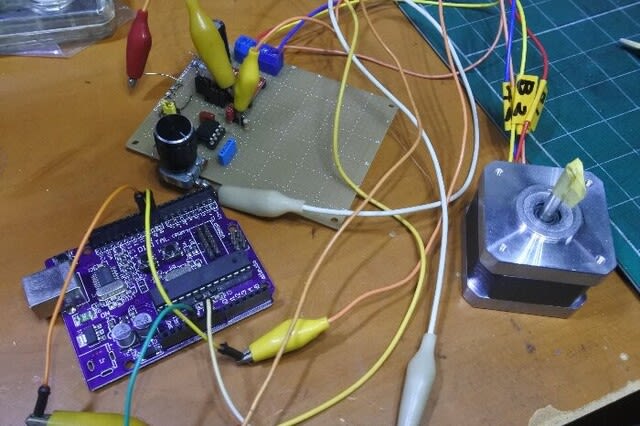
前回の基盤を使って,555の発信を切り離し,ArduinoのUNOからコントロールしてみようと思いました。

結果を先にいうと脱調が激しく失敗!!取りあえず失敗の記録です
まずは結線

UNOのイラストはネットから無料のモノ。
スケッチ

これだけ何で簡単といえば簡単。これだけで動かせるとしたら,離れられなくなりますね・・・

デスクトップからスケッチを描き込む。コンパイルの結果はOK。書き込みも成功。

VRは、100kと50kを用意。結果的には100kの方がコントロールがしやすい。

まともな動作をお見せできなくてちょっと恥ずかしいが、、、こんな状態です。VRを回しても改善せず。
問題点を調査中。ひょっとしたらA4988事態に故障があるかも、別のモータでも試してみないと…
でも、もう12月も中旬なんだよなぁ・・・うちの仕事もしなくちゃぁ
モーターってのは回してるだけで面白いと思い,ただ回して喜んでるだけのじいさんですが,A4988というコントローラが便利ということで,取り寄せてみました。
こんな基板を組んでみたんですが,どうしたわけかノイズがひどい。まわらないことはないのですが,調整幅が狭く,モータが脱調します。
回路は以下のよう。

いくつかピンヘッダを噛ましていますが,左の555のはっしんだけでなく,Arduino等での信号も入れてて見たいので,切り離し用にしてます。
また,A4988のMS1~3は、ステップモードの変換用。モードは以下のようになってるらしい。1/4抵抗はいろいろ試すため。回路とは関係ない。

ピンヘッダを解放して接続なしにすれば古ステップということになり,4.7kΩを介してすべて接続すれば1/16ステップとなる。
7pinのSTEPはコントロール用のパルス入力。ここを切り離して,Arduino等の信号を入れられるようにした。ENはこのままで良いみたい。
8pinのDIRは、回転方向の決定。pinの接続によって回転方向を変える。
ところがところが,実際に回そうとしたら,ある狭い範囲でしか回転しない。VRを回して行くと痙攣した様に振動し,回転方向も反転したり・・・

555からのパルスもそれほど大きな乱れはないように思います。回路も何回も確認したし,,,,,
と,イライラしながら遊んでました(・・・orz・・・)。
これからArduinoで信号を組んでみて,回してみますが,こんなことで時間を食ってました。

モーターはこういうの

19Vとあるけど,5Vでもまわります。


4.7kΩの抵抗は,MSDで

555とA4988を切り離す
原因追及は、マイコンでコントロールして様子見てからにします。
スケッチかけるかな??
UNOを使ってステッピングモータをコントロールするスケッチについて復習していたのですが,回転スピードについてVRでコントロールできないか考えてました。
いろいろと調べるとステッピングモーター用のコンロールICがあるようですね。安かったので発注していますが,まだブツが届かない。

こんなモノのようです。AMAZONで¥795。小口なんで少し遊べそうです。

ピンアサインはこんな用で,Stepni信号を送り込めばいいみたいです。いろいろ見よう見まねで回路を考えて見ました。
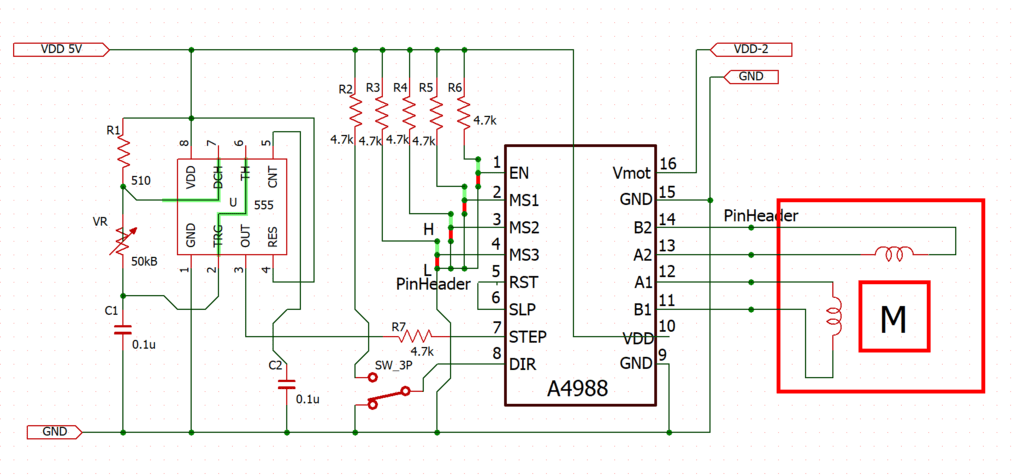
555を用いたコントロール回路。この図でモータへの接続はでたらめです。A9-A2,B1-B2とモータの配線に合わせて接続すべきです。直し忘れです。1~4pinはすべてHighでもいいみたいですね。DIRのスイッチはpinヘッダでも代替できる。手持ちがなかったらpinヘッダにします。
現物が届いたら取り組みましょう。何か問題があったらご指摘くださるとありがたいです。
もう一つ妄想。UNOがいくつかあるので,Arduinoでもコントロールしてみたい。
こんなスケッチではどうなんでしょ?
const int stepPin = 3;
const int dirPin = 2;
const int potPin = A0;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
digitalWrite(dirPin, HIGH); // 回転方向を設定(必要に応じて変更)
}
void loop() {
int potValue = analogRead(potPin); // 可変抵抗の値を読み取る
int delayTime = map(potValue, 0, 1023, 1000, 10); // 可変抵抗の値をステップ間の遅延時間にマップ
digitalWrite(stepPin, HIGH);
delayMicroseconds(delayTime);
digitalWrite(stepPin, LOW);
delayMicroseconds(delayTime);
}
//A4988とステッピングモーターの接続
//モーターの4本のワイヤーをA4988の出力ピンに接続(データシートで確認)。
//VDDをArduinoの5V、GNDをGNDに接続。
//STEPピンをArduinoのデジタルピン(例:ピン3)に接続。
//DIRピンをArduinoのデジタルピン(例:ピン2)に接続。
//可変抵抗とArduino
//可変抵抗の中央端子をArduinoのアナログピン(例:A0)に接続。
//他の2つの端子を5VとGNDに接続。
まだ構想の段階です
急に寒くなったりまた夏日になったりで,ちょっと体調を崩しました。熱は37℃程度ですが,咳とのどが痛い。
さて,サーボーモータのドライバーですが,最後のお試しはNE555タイマー。

CMOSタイプではないですが,ソケット付きで50個600円也で売ってたので思わずポチッと・・・けっこう多用途に使えるので,あると便利です。
555を使ったドライブ回路はいろいろ調べて以下のようにしてみました。

なお,発振回路の周波数やDuty比の計算はマスカッチさんのサイトが参考になります。
リンクの一番下にJavascriptを使った計算ができますので,任意の数値を入れて遊んでみるのも面白いです。
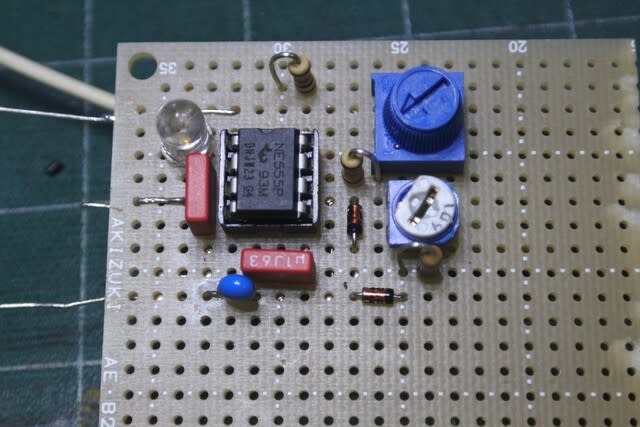
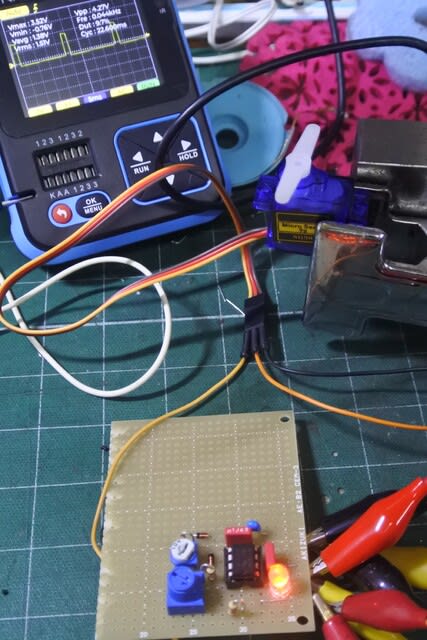

波形に変なヒゲがないとやはり動きがスムーズですね。脱調はありませんでした。
NE555によるサーボモータdrive
いろいろな方法でサーボモータを動かす実験をしてきましたが,しっかり矩形波が出ていると動きはスムーズですね。無安定バイブレータのは電源にノイズが乗っているようですので,この対策をすればナンとかなるでしょうし,UNOを使った場合はスケッチの不備を調べればなんとかなります。
ということで,長々と引っ張ってきたサーボモータを回して喜ぶプロジェクトはお仕舞いに。
やはりサーボモーターのドライブはデジタルだと安定しますね。
今回もライブラリServo.hを利用して簡単制御。
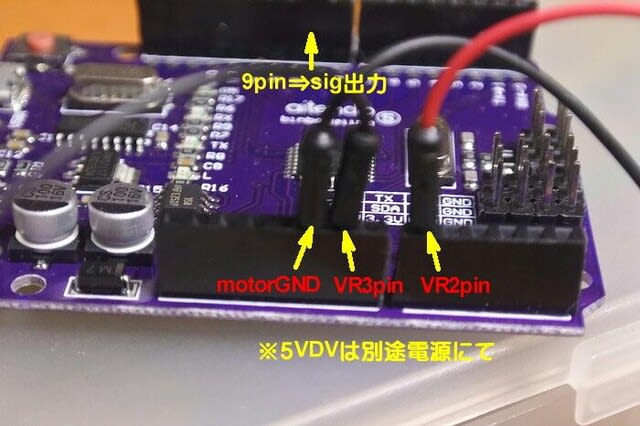
UNOでは 5V出力が1カ所しかなさそうなので,別途に用意。
VRは10kとか50kでは安定しないので,100kΩを使いました。

スケッチはこのようにしました
#include<servo.h>
Servo myservo; // サーボモーターのオブジェクトを作成
int potpin = A0; // 可変抵抗100kBが接続されたアナログピン
int val; // アナログ値を保持する変数
void setup() {
myservo.attach(9); // サーボモーターをデジタルピン9に接続
}
void loop() {
val = analogRead(potpin); // アナログ値を読み取る
val = map(val, 0, 1023, 0, 180); // 0-1023の範囲を0-180度に変換
myservo.write(val); // サーボモーターを制御
delay(15); // サーボモーターが新しい位置に移動するのを待つ
}
//VR100kB 1番端子 (VCC): 5V。2番端子 (OUT): アナログ入力ピン(A0)。3番端子 (GND): グラウンド (GND) 。
動作の様子
ArdiunoUNOによるサーボモータードライブ
あとは555を使って見るとどうかな?
週末は仙台方面に旅行に行ってたので,少しお休みでした。
まずは無安定マルチバイブレータ回路のお試し

図面を書いて見るとこんなようになります。


パーツはみんな手持ちで足りた。1点100kΩの方が半固定抵抗でした。作ってから間違いに気づく。

忠実に作ったつもりですが,脱調が激しい。オシロで見て見ると50Hzがでていない。あと電源の10uFと104のコンデンサーをつけ忘れた。まあこのように動かすこともできるってことだけ確認して,お遊びを続けます。不調の原因はしばらく遊んでから調査します。
次のお遊びは,BLDC用のESCでコントロールしてみる。

ESCによるコントロール
VRの回転とサーボの回転が逆になってる。接続を間違えたか・・・
もひとつ。このコンのロールだと180度の回転にならないみたい。振れ幅は135°くらいかな
あとはArduino+VRでコントロルか・・・
サーボモーターって初めていじったけど,けっこう使えそうです。今回はただ回して喜んでるだけですが,ロボットアームとかいろいろな工作ができそうですね。
サーボモータやステッピングモータを使って何か作るってわけでもないので,お勉強のために遊んでいます。「あちゅんで・・・」とふざけたのは昔アイテンドーの互換機にこんなのがあったなぁと思い出したので・・・
さてさて,
前回のサーボモータの動作不良,結局スケッチの不備に原因があるようでした。まだ書き変えて動作確認してませんが,そのうちに・・・
それと,SG90のデータシートが秋月にあったので,リンクしておきます。これを見ると、90°は2.5msではなくて2.4msのようですね。これもあとで変更して動作確認しなくては・・・

で,

これが正しいようです。訂正前はAliの商品説明からコピーしたモノです。やはりちゃんとデータシートを調べないといけませんね。安易でした。
で,次のお遊びです。
555が沢山あるのでこれで50Hz,duty比変更基板を作ろうと思ってたんですが,その前に・・・・
ネットを徘徊してると,面白い回路に出会いました。
無安定マルチバイブレータによるサーボコントロール
見つけたサイトはここです。

回路を描いて見るとこのようです。昔LEDを交互にピコピコやった回路の応用ですね。これも試してみたい。
注意点としては,回路図ではVccがモーターと共有ですが,別電源の方がいいとのこと。あとで書き直します。
0.22uFコンデンサが手持ちかどうか今探しているところ。C1815は沢山ある。
作ったらまた動作をアップしますね。