2025年4月12日(土曜日) 晴れ
(今までの経緯を振り返ってみると・・・)
Webサイトに掲載されていた記事でSDR(Software Definde Radio
(ソフトウェアでラジオの機能を定義した受信機))とか、DSP
(Digital Signal Processor (デジタル信号処理方式のラジオ)とかいう
ものがあること知りました。
どんなものなのか記事を読んでも難しくてオイらのぼんくら頭では
チンプンカンプンでわかりませんでした。
更に別記事を検索していくと、DSPラジオの組立キットが販売されて
いるのが目に入りました。
お値段も1500円ばかりで安い!
これなら失敗して放り出しても惜しくはありません。
この組立キットを組み立ててDSPってどんなものなのか勉強して
みることにしました。
配達されてきた梱包を開いて出て来た部品一式


DSPってどこにあるのかな?

ポリバリコンの下面にIC基板が取り付けられていました。
黒い塊と、水晶発振器(水晶片?)がありました。
黒い塊がDSPだと思います。

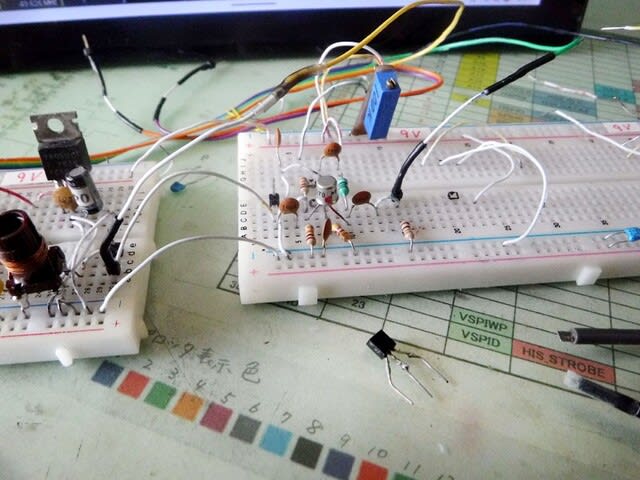
参考資料を頼りに基板を組み立てました。
部屋の天井隅に張り巡らしたアンテナを接続して放送を受信しました。
中波放送、短波放送、FM放送が良く聞こえました。

このDSPラジオでSDRやDSPのことを勉強しようとしてWeb
サイトの記事を読み漁りましたが、微分、積分、SinだのCosinだの
△t、△xだのwtだのと訳が分からないことばかりでちっともわかりません。
こんな難しいことをわかろうと思ったことが無謀なことだったということが
わかりました。( ややこしい表現ですが、難しくてお手上げっていうこと )
まぁ、せめて世界の短波放送でも聴いて遊ぼう・・・ということにしました。
(そして今の様子です)
オイらにできることはダイヤル板を見やすくすることぐらいです。
更に大きく(直径6cm)して短波バンドの周波数範囲を記入しました。
バンド切替のDIPスイッチが隠れてしまうのでHexスイッチ(回転式)
に取り換えました。

机の上に平らに置くとチューニングしずらいのでラジオを立てかける台を
作りました。(段ボール工作です)
電源ランプ(LED)も見ずらいので別途取付ました。
チューニングランプも見安くしました。
バンド切替のHexスイッチは回し難くなってしまいました・・・

今は、机の隅に置いて夜間の短波放送を聞いて遊んでいます。
フェージングしながら聞こえてくる放送から異国情緒の音楽が
流れてきます。 なかなかきれいなメロディーもあります。
(放送には強烈なプロバガンダも・・・・(笑い))
まぁ、こんな具合でDSP、SDRの実験は挫折ですが
三角関数とか何やらを勉強し直して再挑戦してみたいです。
そんなわけで今回の記事はこれで完結とさせていただきます。
長い間、お付き合いをくださった皆さま、誠にありがとうございました。
どうぞこれからも応援をよろしくお願いいたします。
工作実習生