








(1か月シフトした)強化月間の一環として、新コーナー「軌道派アイデアノート」を設けます。タイトル通り、軌道エレベーターに関して、「こんなアイデアを取り入れてはどうか?」「こういう使い方もできるんじゃないか?」といった、私の個人的な発想を書き連ねていくものです。
もともと、「軌道エレベーター豆知識」のコーナーで扱っていくつもりだったのですが、そちらはそちらで、まだまだ取り上げることが山積しているし、基礎知識などの解説と、個人的な発想の紹介は分けた方がやりやすいと考えました。何とぞよろしくお願いいたします。
1. 軌道エレベーターの建造方法の現状
初回は、軌道エレベーターの建造方法についてです。これはもっとも基本的かつ重要でもあり、目下のところ、軌道エレベーターの実現過程に関して私自身非常にこだわっている部分でもあります。以前一部を当サイトの「軌道エレベーター学会」と、昨年開いたワークショップで発表済みなのですが、同系のバリエーションと一緒に簡略化して紹介します。
今回紹介する構想を、勝手に「Fountain式(工法)」と名付けました。軌道エレベーター通の方はおわかりですね? そう、我らのバイブル、「楽園の泉」の原題"Foountain of Paradise"のFountainです。以前は大急ぎで別の名をつけたのですが、地上から軌道エレベーターの構造体を随時生産して送り出すという、噴水のようなイメージにも合い、クラーク氏や作品への敬意も込めてこの名前にさせていただきました。
さて、こんにちの軌道エレベーターの建造プランの筆頭は、ブラッドリー・C・エドワーズ氏らによる、クライマー(氏はクルーザーと呼んでいるが)を使用した、典型的なブーツストラップ工法によるものです。エドワーズプランは、細かい数値を盛り込んだ総合的建造計画を示したことで、多くの研究の参考にされうるものを作り上げ、その貢献は軌道エレベーター史上特筆すべき事績です。私も敬意を抱いていますが、多くの疑問点があるのも事実で、たとえば(一部は以前にも述べたように)下記のような問題点も抱えています。
* 1本1本ケーブルを張って太くしていく方法のため、素材の損耗に伴うメンテナンスが困難で、運用開始時には最初に張ったケーブルの損耗が進んでいるはず。そのため全体構造の疲労度に相当な偏りが生じている可能性がある
* 張ったケーブルを強固に束ねなければならない一方で、メンテナンスのためにそれを簡便にバラせる技術が必要
* 本体素材の一部となるケーブルを括りつけたまま、高度約3万6000km超まで上昇できる機能を持つクライマーの完成を待たなければならない。
──などなど。
こうした問題点を解消、または回避できる方策として、「Fountain式(工法)」を説明します。プランAからCは、いずれも初期段階の下記(1)から(3)まではエドワーズプランを採用し、途中からやり方を変えます。
(1) 本体ケーブルと作業用宇宙船、燃料を積んだペイロードをロケットで低軌道に打ち上げる。
(2) ペイロードの中身を低軌道上で組み立て、さらに 静止軌道上まで到達させる
(3) 静止軌道上からケーブルを地上に向かって繰り出しながらロケットは上昇を続け、ケーブルの先はやがて地上に到達。ロケットは末端でカウンター質量として固定する。これにより、作業用昇降機(エドワーズはクルーザーと呼んでいる)が昇降可能になる。
ここまではエドワーズプランと同じで、以下が、これより後にFountain工法によるプランの一覧です(このうちプランAは軌道エレベーター学会でも説明していますが、改題して改めて略記します)。
2. プランA(プランAの詳細は、軌道エレベーター学会の「Fountain式(工法)とOrbital Shield」をご覧ください)
 地上基部にケーブルの生産工場を設け、遠心力を利用してケーブルを引っ張り上げ、常に新鮮な構造を送り出し続ける方法。
地上基部にケーブルの生産工場を設け、遠心力を利用してケーブルを引っ張り上げ、常に新鮮な構造を送り出し続ける方法。
エドワーズプランの(1)から(3)まで同じ。ただし、末端には、ケーブルを自在に巻き取ったり、逆に繰り出したりする、糸巻きのような機能を持った衛星を設置する。これを「巻き取り衛星」と呼ぶ。
以下続きです。
(1) ケーブルが地上に到達する予定地に、素材生産工場をあらかじめ設けておき、いつでもケーブルを生産できるようにしておく。
(2) 軌道上からのケーブルが地上に到達した時、工場で生産を開始し、先端同士をジョイントさせる。
(3) ジョイントが成立したら、巻き取り衛星が軌道の外側に後退し、ケーブル全体の重心を静止軌道の外側に偏らせる。これにより、遠心力の方がやや強くなり、ケーブルはピンと張った状態となって工場から生産したてのケーブルを引っ張り上げる力がかかる。
(4) 力に合わせて工場はケーブルを生産し、ケーブルの荷重能力に応じて徐々に太いケーブル途切れなく生産して繰り出す。一方、末端の巻き取り衛星は、全体の質量バランスを保ちつつ、常にケーブルの巻き取り量と、巻き取った分で変化する高度を計算しながら、能動的に調整を行う。巻き取り量が、質量バランスの偏りの限界値を超えたら、余った分を静止軌道にプールする。
(5) この作業を続け、当分はひたすらケーブルを太くしていく。必要なら、まきとり衛星のメンテナンス機器や、人間や物資(特に静止軌道ステーションの材料)を繰り出すケーブルにくっつけて宇宙へ送り出すことも行う。
(6) 十分な負荷に耐えるほどの規模や強度に達したら、昇降機や周辺機器を取り付け、運用する。選択肢によっては、工場を増設や拡大して本体を数本に増やす。
(7) 昇降機が運用可能になったら、巻き取り衛星に貯まった素材を分離し、昇降機に載せて地上に持ち帰り、材料として再利用する。この作業を繰り返し、半永久的に再生産と成長を繰り返す。
メリット:クライマーが必要ない
軌道エレベーターの基本構造体のメンテナンスを、新鮮な素材を随時送り出すことによって解消できる
デメリット:ケーブルは大気圏上層部で浸食などが懸念されているため、ケーブルの損耗が心配(ただしこの点については大気圏内よりも宇宙空間の方が損耗度が大きいという意見もあり)。
3. プランB
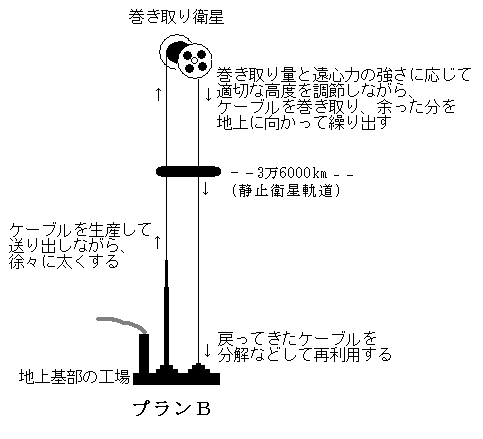 地上基部にケーブル生産工場を設けるのはプランAと同じだが、最終的にケーブルをループ状にして循環させ、再生産を続ける方法。
地上基部にケーブル生産工場を設けるのはプランAと同じだが、最終的にケーブルをループ状にして循環させ、再生産を続ける方法。
(1) 巻き取り衛星を取り付けるのはプランAと同じ。静止軌道より下についてはプランAと同様、地道に下ろしていく。一方、静止軌道より上=外側の方では、巻き取り衛星に、ケーブルを引っかけるようにして(あくまでイメージ的にね)、ケーブルを輪っかにして伸ばしていく。
(2) 巻き取り衛星は、ケーブルの質量と自重との総合的なバランスを計算しながら、静止軌道からの距離と巻き取り量を調整して、徐々に外側にシフトしていく。巻き取れない分は、静止軌道部にもプールする。
(3) 地上側のケーブルが地上に達したら、プランA同様生産を開始。ケーブルを上へ向かって送り出す。
(4) 地上側のケーブルの強度が、もう1本を支えられる程に達したら、巻き取り衛星および静止軌道部にプールしてあったケーブルを、地上に下ろし始める(これを「下りケーブル」と呼ぶ)。地上基部からは引き続き生産して送り出す(これをお「上りケーブル」と呼ぶ)一方、静止軌道部から下りケーブルが降りてくることになる。
(5) 下りケーブルが地上基部に達したら、これも地上基部にジョイントさせる。
(6) 地上基部の生産工場は、随時下ろされてくる下りケーブルを収納、分解して、上りケーブルの材料として再利用し、再生産する。末端の巻き取り衛星は、全体のバランスを能動的に調整しながら、ループのもう一端を担い、ケーブルを地上に送り返していく。
(7) こうして、ケーブル生産の循環を作りだし、材料を有効利用しながら徐々にケーブルを太くして発展させていく。
メリット:循環式で再生産するので使用済みケーブルを捨てずに済み、輸送もせず節約になる
デメリット:ケーブルを一巡させる結果、大気圏上層部などを2度通過させるなど痛めつけることになるため、ケーブルに耐久性が必要。
4. プランC(クライマー、あるいは宇宙船と併用)
 ケーブルの生産工場を静止軌道部に置き、上下(地球の方向と、反対方向)に向かってケーブルを生産し、押し出し続ける方法。
ケーブルの生産工場を静止軌道部に置き、上下(地球の方向と、反対方向)に向かってケーブルを生産し、押し出し続ける方法。
ケーブルの原材料は、クライマーで静止軌道部まで輸送するか、材料の供給拠点が月など地球外にある場合は、輸送用宇宙船で運ぶ。
(1) 地上基部でジョイントしたら、静止軌道部をケーブル生産工場として稼働させるための資材をクライマーで輸送。
(2) 静止軌道部の工場が完成したら、次はケーブルの原材料を輸送
(3) 準備が整ったら生産開始し、上下方向に向かって生産し送り出す
(4) 地上基部と末端では、送り出されてきたケーブルを随時分解、再び原材料化してクライマーで輸送して再利用する
メリット:プランA、Bと同様、メンテナンスが簡便化される
デメリット:応用の効くクライマーの十分な実用化を待つなければならない
上記ABCの共通のメリットは、
* 何と言ってもメンテナンスが簡便化できる
* 建造作業に重力や遠心力=つまり位置エネルギーを利用しているのでコスト削減になる
* 本体を途切れなく造り続けられるので、接合部などの構造上の弱点が減る
* 時間さえかければ構造体をいくらでも巨大化できる
──などです。
一方デメリットは、
* テーパー比を設けずに自重+αの重さに耐える素材が必要
* もし建造途中にクライマーを利用するなら、テーパーに左右されずに昇降可能でなければいけない
──といったところでしょうか。
5. 結び
エドワーズプランの登場と、それを信奉する宇宙エレベーター協会の活動は、軌道エレベーターとは「クライマーを使用してブーツストラップ工法で建造する第一世代のモデルのこと」だという固定観念を植え付けてしまったという印象を抱いています。お陰で、多くのメディアなどが一知半解のまま、ただこれを受け売りするだけの状況になりつつある。以前にも述べたように、それはJSEAの罪です。
それに加担している私はむしろその責めを負う立場なのかも知れません。贖罪と言えば大げさですが、多様性こそ発展のカギであるというのが私の信条でもあり、現状へのささやかなアンチテーゼとして、異なるプランを提示してみた次第です。
決して敬意を失っているわけではありません。本稿でも、初期段階ではエドワーズプランに乗っかっています。私が言いたいのは、意見を闘わせることなしに発展はないということです。この点をご理解いただければ幸いです。
もともと、「軌道エレベーター豆知識」のコーナーで扱っていくつもりだったのですが、そちらはそちらで、まだまだ取り上げることが山積しているし、基礎知識などの解説と、個人的な発想の紹介は分けた方がやりやすいと考えました。何とぞよろしくお願いいたします。
1. 軌道エレベーターの建造方法の現状
初回は、軌道エレベーターの建造方法についてです。これはもっとも基本的かつ重要でもあり、目下のところ、軌道エレベーターの実現過程に関して私自身非常にこだわっている部分でもあります。以前一部を当サイトの「軌道エレベーター学会」と、昨年開いたワークショップで発表済みなのですが、同系のバリエーションと一緒に簡略化して紹介します。
今回紹介する構想を、勝手に「Fountain式(工法)」と名付けました。軌道エレベーター通の方はおわかりですね? そう、我らのバイブル、「楽園の泉」の原題"Foountain of Paradise"のFountainです。以前は大急ぎで別の名をつけたのですが、地上から軌道エレベーターの構造体を随時生産して送り出すという、噴水のようなイメージにも合い、クラーク氏や作品への敬意も込めてこの名前にさせていただきました。
さて、こんにちの軌道エレベーターの建造プランの筆頭は、ブラッドリー・C・エドワーズ氏らによる、クライマー(氏はクルーザーと呼んでいるが)を使用した、典型的なブーツストラップ工法によるものです。エドワーズプランは、細かい数値を盛り込んだ総合的建造計画を示したことで、多くの研究の参考にされうるものを作り上げ、その貢献は軌道エレベーター史上特筆すべき事績です。私も敬意を抱いていますが、多くの疑問点があるのも事実で、たとえば(一部は以前にも述べたように)下記のような問題点も抱えています。
* 1本1本ケーブルを張って太くしていく方法のため、素材の損耗に伴うメンテナンスが困難で、運用開始時には最初に張ったケーブルの損耗が進んでいるはず。そのため全体構造の疲労度に相当な偏りが生じている可能性がある
* 張ったケーブルを強固に束ねなければならない一方で、メンテナンスのためにそれを簡便にバラせる技術が必要
* 本体素材の一部となるケーブルを括りつけたまま、高度約3万6000km超まで上昇できる機能を持つクライマーの完成を待たなければならない。
──などなど。
こうした問題点を解消、または回避できる方策として、「Fountain式(工法)」を説明します。プランAからCは、いずれも初期段階の下記(1)から(3)まではエドワーズプランを採用し、途中からやり方を変えます。
(1) 本体ケーブルと作業用宇宙船、燃料を積んだペイロードをロケットで低軌道に打ち上げる。
(2) ペイロードの中身を低軌道上で組み立て、さらに 静止軌道上まで到達させる
(3) 静止軌道上からケーブルを地上に向かって繰り出しながらロケットは上昇を続け、ケーブルの先はやがて地上に到達。ロケットは末端でカウンター質量として固定する。これにより、作業用昇降機(エドワーズはクルーザーと呼んでいる)が昇降可能になる。
ここまではエドワーズプランと同じで、以下が、これより後にFountain工法によるプランの一覧です(このうちプランAは軌道エレベーター学会でも説明していますが、改題して改めて略記します)。
2. プランA(プランAの詳細は、軌道エレベーター学会の「Fountain式(工法)とOrbital Shield」をご覧ください)
地上基部にケーブルの生産工場を設け、遠心力を利用してケーブルを引っ張り上げ、常に新鮮な構造を送り出し続ける方法。エドワーズプランの(1)から(3)まで同じ。ただし、末端には、ケーブルを自在に巻き取ったり、逆に繰り出したりする、糸巻きのような機能を持った衛星を設置する。これを「巻き取り衛星」と呼ぶ。
以下続きです。
(1) ケーブルが地上に到達する予定地に、素材生産工場をあらかじめ設けておき、いつでもケーブルを生産できるようにしておく。
(2) 軌道上からのケーブルが地上に到達した時、工場で生産を開始し、先端同士をジョイントさせる。
(3) ジョイントが成立したら、巻き取り衛星が軌道の外側に後退し、ケーブル全体の重心を静止軌道の外側に偏らせる。これにより、遠心力の方がやや強くなり、ケーブルはピンと張った状態となって工場から生産したてのケーブルを引っ張り上げる力がかかる。
(4) 力に合わせて工場はケーブルを生産し、ケーブルの荷重能力に応じて徐々に太いケーブル途切れなく生産して繰り出す。一方、末端の巻き取り衛星は、全体の質量バランスを保ちつつ、常にケーブルの巻き取り量と、巻き取った分で変化する高度を計算しながら、能動的に調整を行う。巻き取り量が、質量バランスの偏りの限界値を超えたら、余った分を静止軌道にプールする。
(5) この作業を続け、当分はひたすらケーブルを太くしていく。必要なら、まきとり衛星のメンテナンス機器や、人間や物資(特に静止軌道ステーションの材料)を繰り出すケーブルにくっつけて宇宙へ送り出すことも行う。
(6) 十分な負荷に耐えるほどの規模や強度に達したら、昇降機や周辺機器を取り付け、運用する。選択肢によっては、工場を増設や拡大して本体を数本に増やす。
(7) 昇降機が運用可能になったら、巻き取り衛星に貯まった素材を分離し、昇降機に載せて地上に持ち帰り、材料として再利用する。この作業を繰り返し、半永久的に再生産と成長を繰り返す。
メリット:クライマーが必要ない
軌道エレベーターの基本構造体のメンテナンスを、新鮮な素材を随時送り出すことによって解消できる
デメリット:ケーブルは大気圏上層部で浸食などが懸念されているため、ケーブルの損耗が心配(ただしこの点については大気圏内よりも宇宙空間の方が損耗度が大きいという意見もあり)。
3. プランB
地上基部にケーブル生産工場を設けるのはプランAと同じだが、最終的にケーブルをループ状にして循環させ、再生産を続ける方法。(1) 巻き取り衛星を取り付けるのはプランAと同じ。静止軌道より下についてはプランAと同様、地道に下ろしていく。一方、静止軌道より上=外側の方では、巻き取り衛星に、ケーブルを引っかけるようにして(あくまでイメージ的にね)、ケーブルを輪っかにして伸ばしていく。
(2) 巻き取り衛星は、ケーブルの質量と自重との総合的なバランスを計算しながら、静止軌道からの距離と巻き取り量を調整して、徐々に外側にシフトしていく。巻き取れない分は、静止軌道部にもプールする。
(3) 地上側のケーブルが地上に達したら、プランA同様生産を開始。ケーブルを上へ向かって送り出す。
(4) 地上側のケーブルの強度が、もう1本を支えられる程に達したら、巻き取り衛星および静止軌道部にプールしてあったケーブルを、地上に下ろし始める(これを「下りケーブル」と呼ぶ)。地上基部からは引き続き生産して送り出す(これをお「上りケーブル」と呼ぶ)一方、静止軌道部から下りケーブルが降りてくることになる。
(5) 下りケーブルが地上基部に達したら、これも地上基部にジョイントさせる。
(6) 地上基部の生産工場は、随時下ろされてくる下りケーブルを収納、分解して、上りケーブルの材料として再利用し、再生産する。末端の巻き取り衛星は、全体のバランスを能動的に調整しながら、ループのもう一端を担い、ケーブルを地上に送り返していく。
(7) こうして、ケーブル生産の循環を作りだし、材料を有効利用しながら徐々にケーブルを太くして発展させていく。
メリット:循環式で再生産するので使用済みケーブルを捨てずに済み、輸送もせず節約になる
デメリット:ケーブルを一巡させる結果、大気圏上層部などを2度通過させるなど痛めつけることになるため、ケーブルに耐久性が必要。
4. プランC(クライマー、あるいは宇宙船と併用)
ケーブルの生産工場を静止軌道部に置き、上下(地球の方向と、反対方向)に向かってケーブルを生産し、押し出し続ける方法。ケーブルの原材料は、クライマーで静止軌道部まで輸送するか、材料の供給拠点が月など地球外にある場合は、輸送用宇宙船で運ぶ。
(1) 地上基部でジョイントしたら、静止軌道部をケーブル生産工場として稼働させるための資材をクライマーで輸送。
(2) 静止軌道部の工場が完成したら、次はケーブルの原材料を輸送
(3) 準備が整ったら生産開始し、上下方向に向かって生産し送り出す
(4) 地上基部と末端では、送り出されてきたケーブルを随時分解、再び原材料化してクライマーで輸送して再利用する
メリット:プランA、Bと同様、メンテナンスが簡便化される
デメリット:応用の効くクライマーの十分な実用化を待つなければならない
上記ABCの共通のメリットは、
* 何と言ってもメンテナンスが簡便化できる
* 建造作業に重力や遠心力=つまり位置エネルギーを利用しているのでコスト削減になる
* 本体を途切れなく造り続けられるので、接合部などの構造上の弱点が減る
* 時間さえかければ構造体をいくらでも巨大化できる
──などです。
一方デメリットは、
* テーパー比を設けずに自重+αの重さに耐える素材が必要
* もし建造途中にクライマーを利用するなら、テーパーに左右されずに昇降可能でなければいけない
──といったところでしょうか。
5. 結び
エドワーズプランの登場と、それを信奉する宇宙エレベーター協会の活動は、軌道エレベーターとは「クライマーを使用してブーツストラップ工法で建造する第一世代のモデルのこと」だという固定観念を植え付けてしまったという印象を抱いています。お陰で、多くのメディアなどが一知半解のまま、ただこれを受け売りするだけの状況になりつつある。以前にも述べたように、それはJSEAの罪です。
それに加担している私はむしろその責めを負う立場なのかも知れません。贖罪と言えば大げさですが、多様性こそ発展のカギであるというのが私の信条でもあり、現状へのささやかなアンチテーゼとして、異なるプランを提示してみた次第です。
決して敬意を失っているわけではありません。本稿でも、初期段階ではエドワーズプランに乗っかっています。私が言いたいのは、意見を闘わせることなしに発展はないということです。この点をご理解いただければ幸いです。