








2018年打上予定のESAのExoMarsに使用されるローバー「the Seeker」のテストが5月にチリのアタカマ砂漠で行われた様子が6月18日に紹介されています。

実物大の大きなローバーは、室内実験や屋内実験を繰り返していました。
そして、火星環境に近いアタカマ砂漠での実地テストとなったわけです。
テストでは、目的の6kmの走行は、残念ながら5.1kmに止まりましたが、素晴らしい多くの経験を積むことが出来たとのことです。
6kmを完走できなかったのは、天候が理由でした。
試験当日は、非常に暑く風が無かった為、「the Seeker」が異常に熱くなり、風が出るまで停止させた影響とのことです。
下図は、ローバーの走行の様子です。
大きな画像で見ると人が写っていてローバーの大きさが判ります。


流石に火星っぽいです。
しかし、NASAのローバーと大きく違うのは足回りです。
壊れにくさを追求した結果なんでしょうか?なんだか走りにくそうですが・・・
試験した場所は、ヨーロッパ南天天文台の近くで、寒さや風の強い夜には避難場所を提供してくれたとのこと。
「the Seeker」は、完全自律走行を計画していて6kmを時速900mで走り、最初の場所に戻る予定でした。
ESAでは、火星とのタイムラグが最大で40分ほどとなるので自律走行での探査を計画しているとのことです。
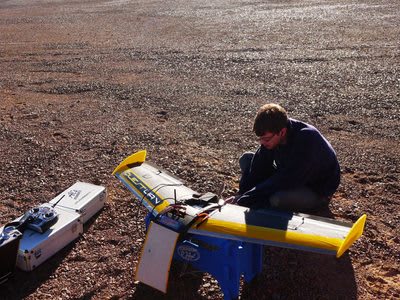
下図は、UAVを整備しているところです。
このUAVで航空写真を詳細に撮影してその情報を元に「the Seeker」の走行プログラムを作成したそうです。

下図は、このテストを実行したThe StarTiger Seeker industrial teamです。

手前左から
Gary Crossさん - BAE Systems - Robotic Platform
Dr. Mark Woods - SciSys - Seeker Technical Lead
Dr. Bach Van Pham - LAAS - DEM Generation and Absolute Localisation
Patricio Raul Arias Ortizさん - Field Guide
後ろ左から
Unal Artanさん - MDA - Path Planning
Estelle Tideyさん - Roke Manor - Visual Odometry
Dr. Andy Shaw - SciSys - Software System Lead
Wayne Tubbyさん - RAL - Programme Logistics and Support
Aron Kisdiさん - RAL - Programme Logistics and Support
Brian Maddisonさん - RAL - Project Manager
実物大の大きなローバーは、室内実験や屋内実験を繰り返していました。
そして、火星環境に近いアタカマ砂漠での実地テストとなったわけです。
テストでは、目的の6kmの走行は、残念ながら5.1kmに止まりましたが、素晴らしい多くの経験を積むことが出来たとのことです。
6kmを完走できなかったのは、天候が理由でした。
試験当日は、非常に暑く風が無かった為、「the Seeker」が異常に熱くなり、風が出るまで停止させた影響とのことです。
下図は、ローバーの走行の様子です。
大きな画像で見ると人が写っていてローバーの大きさが判ります。
{kind=link}
流石に火星っぽいです。
しかし、NASAのローバーと大きく違うのは足回りです。
壊れにくさを追求した結果なんでしょうか?なんだか走りにくそうですが・・・
試験した場所は、ヨーロッパ南天天文台の近くで、寒さや風の強い夜には避難場所を提供してくれたとのこと。
「the Seeker」は、完全自律走行を計画していて6kmを時速900mで走り、最初の場所に戻る予定でした。
ESAでは、火星とのタイムラグが最大で40分ほどとなるので自律走行での探査を計画しているとのことです。
下図は、UAVを整備しているところです。
このUAVで航空写真を詳細に撮影してその情報を元に「the Seeker」の走行プログラムを作成したそうです。
下図は、このテストを実行したThe StarTiger Seeker industrial teamです。
手前左から
Gary Crossさん - BAE Systems - Robotic Platform
Dr. Mark Woods - SciSys - Seeker Technical Lead
Dr. Bach Van Pham - LAAS - DEM Generation and Absolute Localisation
Patricio Raul Arias Ortizさん - Field Guide
後ろ左から
Unal Artanさん - MDA - Path Planning
Estelle Tideyさん - Roke Manor - Visual Odometry
Dr. Andy Shaw - SciSys - Software System Lead
Wayne Tubbyさん - RAL - Programme Logistics and Support
Aron Kisdiさん - RAL - Programme Logistics and Support
Brian Maddisonさん - RAL - Project Manager