結論から言うと、とにかくこの基盤へあれこれ細工をすると、一時的には動いてるように見えるのだが、暫くすると動作不良を起こす。
意味わからん
個別にチェックしつつ、順を踏んでワンステップずつ組み上げるが・・・
同じプログラム動作はフォロを外した構成ではすべて上手く動いている。
なので、10時間以上試行錯誤・検証に費やしたのだが全面撤退
すべての配線を外し元に戻しましたたとさ。
おまけにmicro:bitのLED表示が壊れてしまった。
閉じた完成品に茶々を入れるとろくな事がない、ということでしょう。
ちっ
国際絵画展へロボット出店するのだが、フォロを連れてこいとの要望が出た。
無線操縦とかでも良いんだが、サイバーっぽく改造してみようかなと。
NeoPxcelのブロックにはRGB以外に「色相」というパラメータが使える。
なるほど。Processing系の説明が出てきました。
====== フォロ改造検討 ======
フォロの端子を調べると使えそうな端子が3箇所
A/Bボタンに繋がっている「P5」「P11」
P11を出力で使っての基盤単独実験では一応使えました。
ただしボタン押下時の動作はよくわからん。
押下するとLED表示が一瞬消えている。
フォロはP8未使用のようです。
電源ラインとGNDと共に引き出しておくのもありかな。
いろんな機器をつなげることができそうだ。
フォロ使用ピン番号(
参照元)
- P0 :スピーカー
- P1 :フォロ右側の赤外線センサーの値を取得
- P2 :フォロ左側の赤外線センサーの値を取得
- P12 :フォロ搭載赤外線LEDの制御(多分、1で赤外照射開始)
- P13 :足のモーターの制御(正転)
- P14 :足のモーターの制御(逆転)
- P15 :腰のモーターの制御(正転)
- P16 :腰のモーターの制御(逆転)
フォロを作ったのは2020/4で当時の写真を見ると
のようだ。
No.8は特に機能はなくスルーされている。
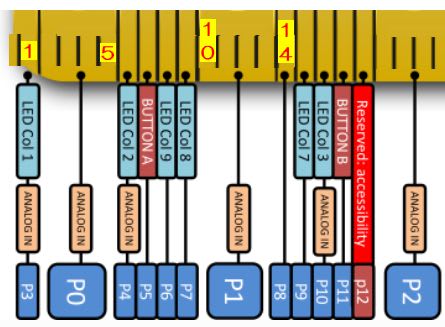
等間隔ピッチから数えると、左から14番目の位置がP8っぽいですね。
micro:bit用のソケットを覗いてみた。
全40Pinの端子があって、左を1として14番目がP8に繋がっていることを導通から確認した。
フォロの頭部を分解し基盤を取り出す開頭手術を実施
フォロの頭脳:基盤の表側、ソケットの間に未使用のスルーホールが見える。
基盤裏側
GNDや3.3V1・・P5,6V(電池直結かも)が取れそうだ。
汎用micro:bit基盤と同じ40端子のソケットのようです。
ということで、P8の位置を特定しました。
ここから線を取り出せば良さそうです。
3線のソケット持ってない。
GROVE端子、AKADAKOで買ったヤツ使おうか。
端子は4ピンで(黄:信号1、白:信号2、赤:Vcc、黒:GND)
デジタルの場合、Pin1がメイン信号、Pin2はサブにアサインするそう。
電源は3.3/5Vなので、3.3Vを与えるが吉
I2C通信の場合は、ピン1:SCL ピン2:SDA などと定まっているようだ。
GROVEの信号2は何をつなごうか・・
A/Bボタン用のPINなら、出力に使える。
micro:bitのP0は普通スピーカに使っている、コイツを信号2に繋いでおけば、アナログ/デジタル入力で使うことが出来るかも。 多分ダメだろうな。
NCにしておくと、必要になった時点でもう1回分解しないとイカンからなぁ・・・
今後フォロで2線のセンサーとかを繋ぐ可能性があるのか?
入力も出力も可能なコネクタも意味ありそうだし・・・
悩んだが、Bボタン(P11)を繋いでおくことにした。
こんな感じで何とか引き出したが・・・
ボタンBから信号を出したら点灯するも、
PIN8から出すと点灯不能・・・
このフォロ基盤を経由しないとうまくいくプログラムなんで、この配線がおかしいか、あるいは基盤が(黙って)PIN8を使っているのか。
スイッチサイエンスのサイトではPIN8は使うとは書いてないんだが。
隣のピンとブリッジしてるとか細かすぎてよく見えていないし、テスターの張りもソケットには差し込めない。
よ~わからんです。
これ以上無理するのはやめようか。
A/Bボタン引き出しもやってみたが、テスト段階では動いていてもしばらくするとLEDドットマトリクスが妙な表示を始める。
micro:bitが1枚壊れてしまったようだ。こいつのせいかもしれない。
ちっ
完全にやめた!
ちなみに1枚ほどパネルを壊してしまった。
PINソケット凸を外す際にハンダが全部溶けていないにも関わらず力をかけて剥がしてしまったため。どうにもならんばい。
情けなか



























 (adafruit社のNeoPixel の配線図から
(adafruit社のNeoPixel の配線図から