「PIC AVR 工作室」サイトの日記的なブログです。
サイトに挙げなかった他愛ないことを日記的に書き残してます。
PIC AVR 工作室 ブログ
CALENDAR
2016年8月
日
月
火
水
木
金
土
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
前月
翌月
Entry Archive
2024年10月
2024年09月
2024年08月
2024年07月
2024年06月
2024年05月
2024年04月
2024年03月
2024年02月
2024年01月
2023年12月
2023年11月
2023年10月
2023年09月
2023年08月
2023年07月
2023年06月
2023年05月
2023年04月
2023年03月
2023年02月
2023年01月
2022年12月
2022年11月
2022年10月
2022年09月
2022年08月
2022年07月
2022年06月
2022年05月
2022年04月
2022年03月
2022年02月
2022年01月
2021年12月
2021年11月
2021年10月
2021年09月
2021年08月
2021年07月
2021年06月
2021年05月
2021年04月
2021年03月
2021年02月
2021年01月
2020年12月
2020年11月
2020年10月
2020年09月
2020年08月
2020年07月
2020年06月
2020年05月
2020年04月
2020年03月
2020年02月
2020年01月
2019年12月
2019年11月
2019年10月
2019年09月
2019年08月
2019年07月
2019年06月
2019年05月
2019年04月
2019年03月
2019年02月
2019年01月
2018年12月
2018年11月
2018年10月
2018年09月
2018年08月
2018年07月
2018年06月
2018年05月
2018年04月
2018年03月
2018年02月
2018年01月
2017年12月
2017年11月
2017年10月
2017年09月
2017年08月
2017年07月
2017年06月
2017年05月
2017年04月
2017年03月
2017年02月
2017年01月
2016年12月
2016年11月
2016年10月
2016年09月
2016年08月
2016年07月
2016年06月
2016年05月
2016年04月
2016年03月
2016年02月
2016年01月
2015年12月
2015年11月
2015年10月
2015年09月
2015年08月
2015年07月
2015年06月
2015年05月
2015年04月
2015年03月
2015年02月
2015年01月
2014年12月
2014年11月
2014年10月
2014年09月
2014年08月
2014年07月
2014年06月
2014年05月
2014年04月
2014年03月
2014年02月
2014年01月
2013年12月
2013年11月
2013年10月
2013年09月
2013年08月
2013年07月
2013年06月
2013年05月
2013年04月
2013年03月
2013年02月
2013年01月
2012年12月
2012年11月
2012年10月
2012年09月
2012年08月
2012年07月
2012年06月
2012年05月
2012年04月
2012年03月
2012年02月
2012年01月
2011年12月
2011年11月
2011年10月
2011年09月
2011年08月
2011年07月
2011年06月
2011年05月
2011年04月
2011年03月
2011年02月
2011年01月
2010年12月
2010年11月
2010年10月
2010年09月
2010年08月
2010年07月
2010年06月
2010年05月
2010年04月
2010年03月
2010年02月
2010年01月
2009年12月
2009年11月
2009年10月
2009年09月
2009年08月
2009年07月
2009年06月
2009年05月
2009年04月
2009年03月
2009年02月
2009年01月
2008年12月
2008年11月
2008年10月
2008年09月
2008年08月
2008年07月
2008年06月
2008年05月
2008年04月
2008年03月
2008年02月
2008年01月
2007年12月
2007年11月
Recent Entry
LANケーブル交換した
MFT2024行ってきた
こないだのロボット
ロボット行ってきた
土星と月
点火プラグ交換した
こないだのロボット
潮来に行ってきた
ロボット行ってきた
88の日
Recent Comment
nekosan/
JYRUSSやってきたメモ
フルタニアン/
JYRUSSやってきたメモ
nekosan/
JYRUSSやってきたメモ
フルタニアン/
JYRUSSやってきたメモ
nekosan/
こないだのロボット
フルタニアン/
こないだのロボット
nekosan/
こないだのロボット
フルタニアン/
こないだのロボット
nekosan0/
レジ袋ホルダーを考える
フルタニアン/
レジ袋ホルダーを考える
Category
ノンジャンル
(2844)
PIC
(47)
AVR
(341)
Arduino
(446)
Raspberry Pi
(193)
mbed
(41)
ARM
(30)
ESP32
(15)
Android
(10)
OPアンプ
(125)
VHDL
(57)
PSoC
(4)
アナログ回路
(110)
クルマ
(127)
rails
(51)
本
(42)
導電塗料
(3)
Fritzing
(41)
Edison
(2)
FFT
(34)
写真
(158)
MIDI
(24)
その他日記
(11)
Python
(57)
3Dプリンタ
(124)
Bookmark
最初はgoo
goo blogトップ
スタッフブログ
My Profile
ブログID
nekosan0
自己紹介
Search
このブログ内で
ウェブ全て
ゆりかもめ乗ってきた
ノンジャンル
/
2016年08月08日
逆三角形。
行ってきた。
今回もゆりかもめ。車内が結構暑かった。まぁ、
ゆりかもめだけじゃなくて、JRもだったけど。
今回は、いけるか微妙なところもあったので、当日券。
入り口の近くから順々に探検。
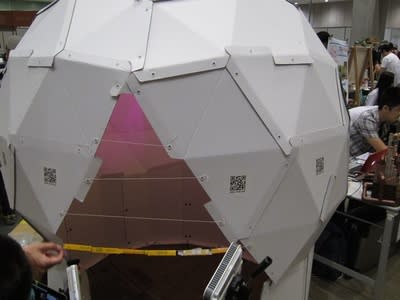
「お家でドームプロジェクション」
なんか、左下のプロジェクターで投影しているみたい。
こういう形で、ドームにプロジェクションできるのか。
これはぐっと来た。
千葉工大の小型ロケット。
デジファブギター工房さんの、
レーザーカットギター。
レーザーカットした板でエレキギター。
宇田さんの、ウダーの生演奏。
奇楽堂&カンパニーさんの電子楽器いろいろ。
マジックフルート。秋月の気圧センサーを使って、
息を吹き込んだときに圧力が上がるのを読み取って、
ノートオンのトリガにしているとのこと。音階は、
静電タッチセンサーらしい。筐体の質感もいい。
写真左側にある、マウスピースと、その下の細長い基板
が、マジックフルートに入っているメインパーツ。
Gセンサーも入っているらしく、角度によってビブラート
(?)が掛けられるようになってる、ってお話だった。
ちょうどデモしていただいてたときに、iPhoneとの
接続が調子悪くなってしまったようで、Gセンサー
の機能については見れなかった。
同じく奇楽堂さんの、4オペFM音源モジュール。
Raspberry Piで、FM音源の波形計算をソフト処理
して、USB接続の外部DACで音を出力しているとのこと。
やっぱり、オンボードのDACは音質よくないので、
USBの外部DACがいいみたい。
同じく奇楽堂さんの、手回しMIDIシーケンサ。
光学読み取り。
iPhone用のかっちょいいホーン。
失敗したって
いいじゃないか
ロボットだもの
日本畳楽器製造 with 自動演奏ロボットさんのギター。
畳がギターになってる!
YAMAHA、ハンドクラフトIoTギター。
着いたときには、もう配布品品切れだった。
https://fabble.cc/
ここで設計図公開しているみたい。
ハチロクの電気自動車。電気自動車って、エンジンとか
ミッションとか、重くてでかいものあまりないから、
けっこうすっからかんな感じになるんだな。あとは
バッテリーの置き場所くらいなのかな。
I/O電子工作部。DANとDAN二世。
negi.moeさん。
でっかいネギ型キーボード。ぼや式で歌えるキーボード
だと思うんだけど、デモが見れなかったので、詳しくは
わからず。
水力時計。きれい。
レーザーカッターで切り出したきれいなギアを使って、
時計表示。水力駆動。
正確な時刻制御の周りは、いろいろ構想があるみたい。
それにしても、今回一番おしゃれだったのは、やっぱ
これだな。
横で見学していた女性が、ものすごく食いついて質問
していた。
今回、最も度肝を抜かれたのはこれ。
バーチャルジンバル。
SDカードサイズの中に、マイクロSDのスロットと、
9軸センサ、専用メモリを内蔵して、ジャイロの
情報を(マイクロSDとは別に)記録しておいて、
あとでPC上で、そのセンサーデータと映像を合わ
せて、画面のぶれを自動補正するという仕組み。
すっごい面白かったので、いろいろ質問しまくって
きたんだけど、いわく、
・センサー情報にはタイムスタンプは含まない
・映像から画像認識で自動的にブレの情報を抽出
・このブレ情報とセンサーデータの波形の位相を自動
で比較して、自動で時刻あわせを行う
(つまり、ブレの位相は映像信号を、ブレの波形は
センサーからの情報を使用)
・PC画面上で補正量や画角などを調整(指定)でき、
リアルタイム表示しながら補正の度合いとかを弄れる
・9軸センサーを内蔵しているが、補正に使うのは
ジャイロ(3軸)だけで足りる
とのこと。で、やっぱり、GoPro用みたいな小型小パワー
低剛性のジンバルみたいんじゃなくて、一眼レフの
大口径レンズ使って、動画だって大きなボケを使って
きれいな映像にしたいよねぇ?というお話。
そうそう。そうなのよ。
一眼レフで動画撮って、それを補正できたらいいよねぇ、
と思ってたんだけど、それが実現できるのがこれだ。
すばらしい。
ちなみに、よくあるような既製品のジンバルだと、
カメラをパンしたときに、それがパンなのかブレなのか
を判断しかねる部分があるので、どうしても映像が
ワンテンポ遅れて付いていく感じになるんだけど、
このシステムを使うと、PC上で合成する際に、いわゆる
「未来データ」にアクセスできるから、そういった
遅れは理論上発生しないということ。
確かに、映像眺めていると、そいういった遅れは
判らない。うん、これいいな。
なにより、カメラごとの画像フォーマットとか、
カメラ本体の時刻設定のずれとか、全然気にせず、
どんなカメラでもオッケーなので、本当に都合
がいい。
これはきっと製品化されて、あちこちで利用される
ことになるだろう…というか、オイラが欲しい。
LEDのストロボにシンクロして、水滴が正弦波っぽい
残像(?)になる。写真だとちょっと流れちゃってる
けど、実際に見ると、かなりきれいな波形でシンクロ
してる。
ミニ四駆に搭載したカメラを使って、Oculus Riftで
映像を眺められるというバーチャル体験。
なので、頭をあっちこっちに振ると、当然、頭の向き
にあわせて、周囲の映像が表示される、っていうデモ
を見せていただいた。
映像はEdison使って、Wi-Fiで飛ばしているとのこと。
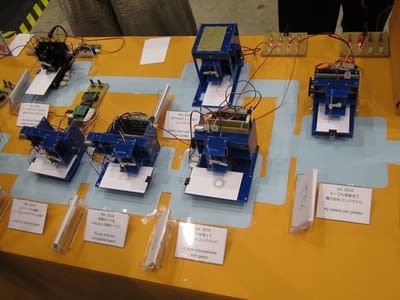
いしかわきょーすけさんの、プロッター勢ぞろい。
短期間に、ものすごい数のプロッター完成されている。
部品状態(レーザーカッターで切り出した状態)のもの
も、クリアケースで展示されてたんだけど、写真を撮り
忘れた…
どうやって、ああいう風に、「立体に組みあがる」ものを
図面に描きだしているのか、すごい興味津々だったん
だけど、
「Inkscapeで力技」
とのこと。いや、きっと、なにかすごいノウハウがあるん
じゃないかなぁ、って気がする。実物見ると、あれだけ、
びしっとパーツ同士がきれいに組み合わさってて
すばらしい。
3Dプリンタと違って、レーザーカッターって、1台分の
パーツを板から切り出すのに、10分もかからないみたい。
それは使い勝手いいなぁ。
3Dプリンタも、CNCフライスも、加工時間がすごいんだよな。
それだけ短いと、「ちょっと試してみる」が捗りそう。
お話ついでに、3Dプリンタ関係の書籍を押し売り(0円)
してきた。そしたら、ありがたいことに、なんと、
「世界に秋葉原が3つ欲しい」の試作版を頂いてしまった。
かえって申し訳なかったです。本当にありがとうございます。
で、帰って来てからまた読み返す。ぐっと来る。
台湾に行きたい。最後のページのエピローグを読むと、
自分もあちこち旅してみたくなる。
akira matsuiさんの、8ピンシンセ。いろいろ伺ってきた。
・CPU内部で波形合成して、アナログ出力している、
ワンチップ構成のシンセサイザー
・いわゆるアナログシンセ的な波形を合成している
(中身はソフトによるデジタル処理)
・右上のブレッドボードは、単体で動かしている回路
・8ピンモジュール自体はモノフォニックで、これを複数
並べることで、好きなだけポリ出力に構成できる
・CPUは8051(互換?)を高クロックでまわしている
・使用する信号フォーマットは、ほぼMIDI信号
(31250bpsのuart信号と理解。3.3V I/O?)
・波形指定のパラメタはCC信号を独自拡張
(プログラムチェンジで楽器を切り替えるイメージ
ではない)
・この写真では、キーボード本体左側のモジュールに
チャンネル振り分けの機能が入っていて、右側に
4ch分の音源モジュール基板を内蔵(4ポリ)
・写真右の小さい鍵盤型はシーケンサで、MIDI出力
ではなく、音源内蔵していて、直接音声信号が出る
そういえば、各モジュール側は、自分のチャンネルが
何番なのかを、どうやって認識しているのかを聞くの
忘れてしまった…
それにしても、こういう風につまみを弄って音を鳴らす
感覚、いいよなぁ。
ISSトラッカー。
NORADのISSの座標データを監視して、リアルタイムで
どこを飛行しているかを表すとのこと。
きゅうり選別マシン。画像認識を使っているみたい。
曲がり具合とか。
このほかにも、IoTの農業利用関係のものがいくつかあった。
会場じゅうに鳴り響く、「ドカン」の音がこれ。
デモの時間にあわず、間近では見れなかった。
テスラコイル。鳥かご(?)の中のテスラコイルから
ビビビと稲妻。
んで、これを使って音楽を演奏。
こういうの、映像では見たことあったけど、お目に
かかるのは初めて。
ほかにも、写真撮れてないけど、いくつか回ってきた。
kenkenさんのmachikaniaとか、カラーコンポジット
映像がぐるぐる回るデモとか、実物をいろいろ解説
していただけた。
マイコンは、映像処理が相当忙しいはずなので、
グラフィックの更新処理はどんなかんじなのかなぁ?
と思ったら、やっぱり水平ブランク、垂直ブランクの
間で一気に片付ける感じとのこと。
あと、素のC言語だと、やっぱり割り込みタイミング
のレスポンスとか、Cコンパイラの最適化処理とかで、
タイミング調整がぐちゃぐちゃになるので、インライン
アセンブリで緻密に処理しているとのこと。
やっぱり、そういうの必要になるだろうな。
すごい緻密。
あと、MaBeeeの説明も聞いてきた。
もし、水中モーターを2個とか搭載したものを作って、
その1個1個をコントロールしたら、水中ラジコンが
できないっすかねぇ?と質問したところ、
「BLEなんで、水中にとどかないっす」
とのこと。なるほど。
ってことは、Wi-Fiタイプが出来たら、潜水艦制御も
できるのかな?ケルマディック号だ。
駅が混む前に、今回は20分くらい前に離脱。まだ
ちゃんと見れてないところもいっぱいあったんだけど、
居たら居たで、いくらでも時間が吸い込まれていく
からな。
それにしても、やっぱりいろいろな人がアイデアを
振り絞って作ったものを見て回るのは、すごい
刺激的だな。
出展者のみなさま、主催者のみなさま、お疲れ様
でした。
コメント (
0
)
goo ブログ
ブログの作成・編集
gooおすすめリンク
おすすめブログ
【コメント募集中】スタッフの気になったニュース
@goo_blog
【お知らせ】
【gooブロガー・先着】dアカウント連携でdポイント2,000pt
ブログを読むだけ。毎月の訪問日数に応じてポイント進呈
【コメント募集中】goo blogスタッフの気になったニュース
gooブロガーの今日のひとこと
訪問者数に応じてdポイント最大1,000pt当たる!