









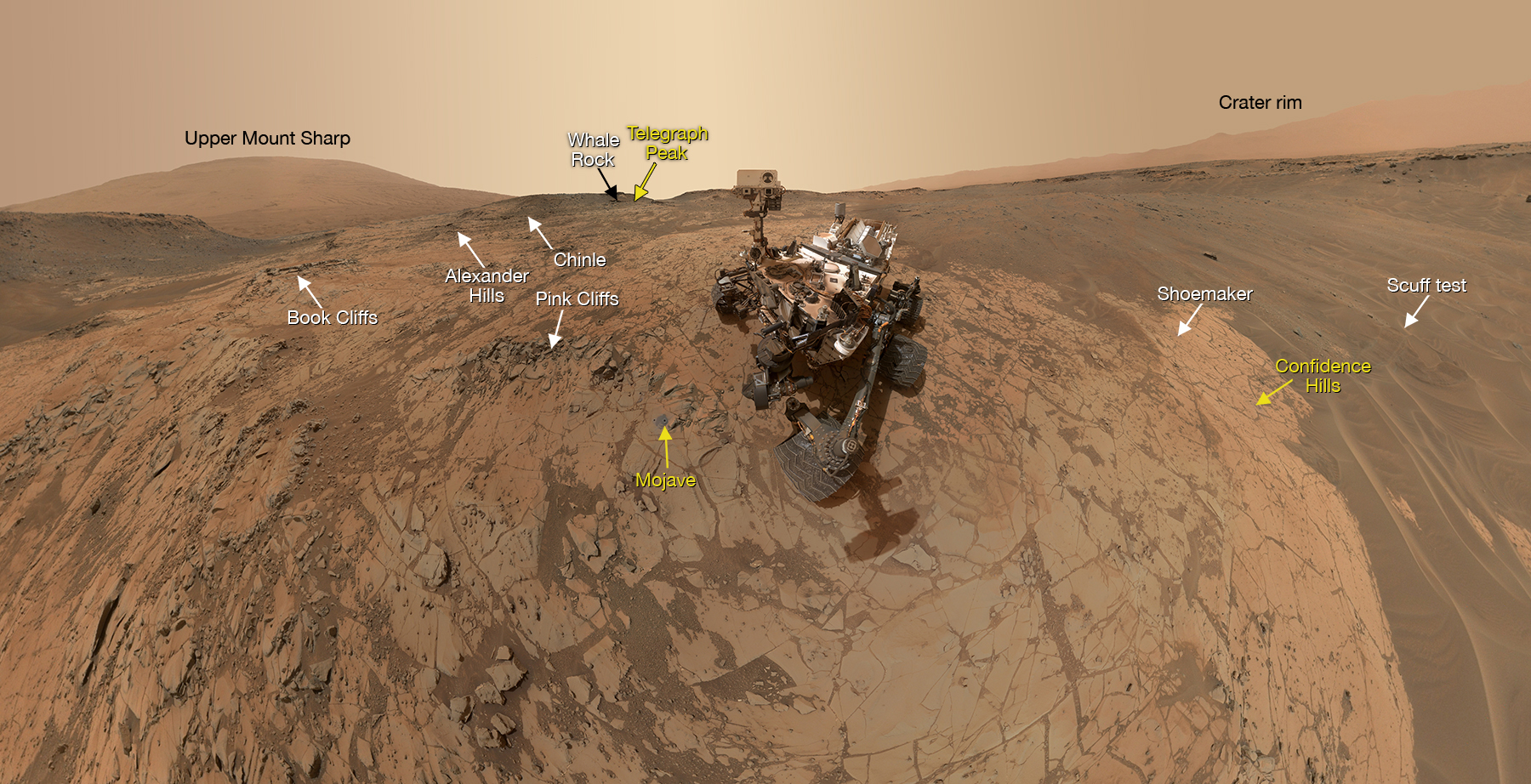
 NASAのキュリオシティローバーのこの自画像(右)は、二回目の穿孔を行なった火星のシャープ山における「モハベ(Mojave)」領域を示している。この場面は、2015年1月に、ロボットアームの先端の火星ハンドレンズ画像(MAHLI)カメラでとられた何十ものイメージを結合してつくられた。「パーランプ・ヒルズ(Pahrump Hills)」のローバーを囲む青白い露岩とシャープ山の上部が地平線に見える。ローバーは「コンヒデンス・ヒルズ(Confidence Hills)」でもそのサンプル収集ドリルを使った。また、今、2月下旬には第3の穿孔サイトとして「テレグラフ・ピーク(Telegraph Peak)」を調べられている。この合成の構成要素イメージをとるためにアームの先端のタレットに搭載したカメラが使われた。この視界にはロボットアーム自身は含まれていない。
NASAのキュリオシティローバーのこの自画像(右)は、二回目の穿孔を行なった火星のシャープ山における「モハベ(Mojave)」領域を示している。この場面は、2015年1月に、ロボットアームの先端の火星ハンドレンズ画像(MAHLI)カメラでとられた何十ものイメージを結合してつくられた。「パーランプ・ヒルズ(Pahrump Hills)」のローバーを囲む青白い露岩とシャープ山の上部が地平線に見える。ローバーは「コンヒデンス・ヒルズ(Confidence Hills)」でもそのサンプル収集ドリルを使った。また、今、2月下旬には第3の穿孔サイトとして「テレグラフ・ピーク(Telegraph Peak)」を調べられている。この合成の構成要素イメージをとるためにアームの先端のタレットに搭載したカメラが使われた。この視界にはロボットアーム自身は含まれていない。
<参考>:キュリオシティは2011年11月に打上げられ、2012年8月に火星に着陸したロ-バー(探査車)。このイメージはローバー自身のロボットアームの先端のカメラで撮られているので歪んでいる。左のイメージがそのモックアップ。左の写真の赤い線の左側がロボットアームの先端のハンドレンズカメラ搭載位置。
<出典>: 「今日のイメージ(Image of the day)」
<大判>: 右のイメージをクリック。周囲の地名入りのイメージは こちら から。






{kind=link}
※コメント投稿者のブログIDはブログ作成者のみに通知されます