








1. 概要
北海道衛星プロジェクトは民間主導の新しい宇宙産業を構築するために,小型衛星による宇宙ビジネスの成功事例を作ることを目的としている.衛星開発においては従来の開発品の発想,または工業製品へのイノベーションが必要である.衛星を小型化することにより,プロジェクト経費が下がり,大学や民間企業が参加できる環境ができる.これは従来の国家主導の大型プロジェクトの流れとは異なる新たな宇宙産業を生み出す流れといえる.
北海道衛星「大樹」は,重量50kgのリモートセンシング衛星であり,ハイパースペクトルセンサを使用した農地観測をメインミッションとしている.
図1. 北海道衛星「大樹」
北海道衛星「大樹」のシステムブロック図を下図に示す.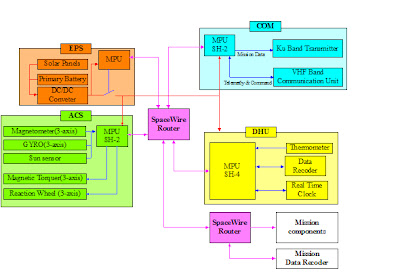
図2. システムブロック図
2. 姿勢制御系
北海道衛星における姿勢制御系の目的は,地球観測,光通信,軌道制御時におけるポインティング及び姿勢の安定化である.それぞれのタスクにおける要求精度を表1に示す.特徴としては,日照・日陰の双方での3度以内の姿勢制御精度が必要なことが挙げられる.
表1. 要求精度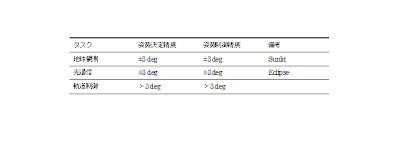
姿勢外乱の主要因として,ここでは空気抵抗トルク(Ta),重力傾斜トルク(Tg),地磁気トルク(Tm),輻射圧トルク(Tr)の4つを検討した.本衛星システムにおける軌道高度に対する各外乱トルクの概算値を図3に示す.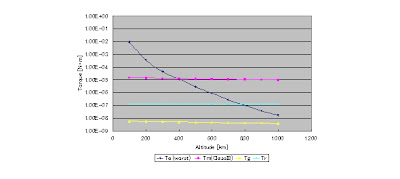
図3. 自然外乱
これより,想定軌道高度566kmでの主要外乱は地磁気トルクである.磁気トルクの最悪値を外乱トルクTD=1.2e-5[N・m]として考慮する.
要求精度より,ゼロモーメンタム方式の3軸制御を行う.検討したセンサ・アクチュエータ構成は以下のとおり
○ 姿勢制御系の基本性能
アクチュエータは非冗長構成とし,3つのリアクションホイールとアンローディングのための3軸の磁気トルカからなる.
リアクションホイールの制御力の見積もりを以下に記す.
外乱トルクの最悪値がTD=1.2e-5[N・m]であり,これが常に加わり続けているとする.このとき,軌道周期がT=5760[s]より,2周期の間に蓄えられる角運動量は,
h=2*5760*1e-5=1.15e-1[N・m・s]
これより,RWの最大蓄積角運動量は1.5e-1[N・m・s]以上あれば,2周期の間アンローディングせずともよい.
3. データ処理系
データ処理系は,衛星内の各種データの制御,衛星状態の監視,地上局とのデータ交換を目的として,データ処理を行う.
(1) コマンド受信処理
コマンドフォーマットには,CCSDSが勧告している国際標準方式であるパケットテレコマンドを採用する.ビットエラー対策にはBCH符号およびCRCによる誤り検出を行う.
(2) テレメトリ送信処理
テレメトリフォーマットにはコマンド受信処理と同様にCCSDSパケットテレメトリを採用する.また,畳み込み符号とリードソロモン符号を用いてビット誤り訂正を行う.
データ処理系のCPUには民生品であるルネサステクノロジのSH4を採用する.使用予定のSH-4は32bit RISC(縮小命令セットコンピュータ),300MIPSのCPUである.また,SH-4は数年前に北海道工業大学佐鳥研究室が高崎原研にて,放射線試験を実施し,放射線環境下においても使用可能であることを実証済みである.試験結果を下図に示す.また,放射線へのさらなる対策として,高周期のWDT(ウォッチドッグタイマ)による監視機能強化やメモリ書き込み時の誤り訂正符号の付加とハードウェアの冗長性を加える予定である.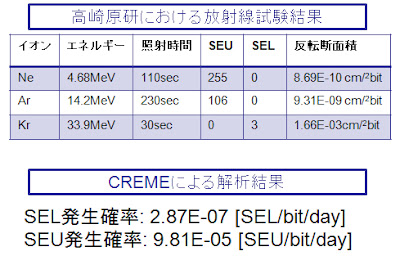
4. 電源系
電源系には後述する「超小型バス実証衛星:HIT-SAT」で実証した電源系のスケールアップモデルを採用する.システムブロック図を下図に示す.充電方式にはトリクル充電を採用している.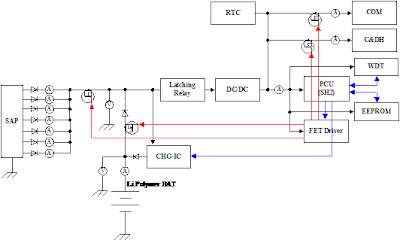
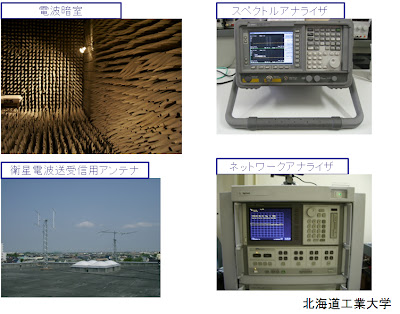
5. 北海道における環境試験の設備状況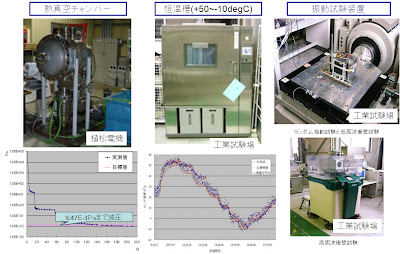

最新の画像[もっと見る]
-
 「北の起業家表彰」 特別賞を受賞しました
10年前
「北の起業家表彰」 特別賞を受賞しました
10年前
-
 「北の起業家表彰」 特別賞を受賞しました
10年前
「北の起業家表彰」 特別賞を受賞しました
10年前
-
 推薦入試(初日)
10年前
推薦入試(初日)
10年前
-
 推薦入試(初日)
10年前
推薦入試(初日)
10年前
-
 推薦入試(初日)
10年前
推薦入試(初日)
10年前
-
 科学・技術のニュース141106-メッセナゴヤ
10年前
科学・技術のニュース141106-メッセナゴヤ
10年前
-
 科学・技術のニュース141106-メッセナゴヤ
10年前
科学・技術のニュース141106-メッセナゴヤ
10年前
-
 科学・技術のニュース141106-メッセナゴヤ
10年前
科学・技術のニュース141106-メッセナゴヤ
10年前
-
 ほどよし衛星の画像
10年前
ほどよし衛星の画像
10年前
-
 紫色のアスパラのスペクトル画像
10年前
紫色のアスパラのスペクトル画像
10年前
※コメント投稿者のブログIDはブログ作成者のみに通知されます