








US10948302(TOMTOM GLOBAL CONTENT BV [NL])
[0002] This invention relates, in certain aspects and embodiments, to methods and systems for improved positioning accuracy relative to a digital map, and which is needed for highly and fully automated driving applications.
【0001】
この発明は、ある態様及び実施形態において、非常に十分に自動化された運転の適用に必要とされる、デジタル地図に対する改良された位置決め精度のための方法及びシステムに関する。
Such methods and systems may use localisation reference data associated with a digital map.
当該方法及びシステムは、デジタル地図と関連付けられたローカライゼーション(位置特定)基準データを使用してもよい。
In further aspects, the present invention relates to the generation of localisation reference data associated with a digital map, including the format of the reference data, and the use of the reference data.
更なる態様では、本発明は、基準データのフォーマットを含んだ、デジタル地図と関連付けられたローカライゼーション基準データの生成、及び当該基準データの使用に関する。
For example, embodiments of the invention relate to the use of the reference data through a comparison to sensed data from a vehicle to accurately position the vehicle on the digital map.
例えば、本発明の実施形態は、デジタル地図上で車両を正確に位置決めするための車両からの撮影データとの比較を通じた基準データの使用に関する。
///////
This would lead to a misleading depth value for the pixel, which would lead to problems when correlating real-time vehicle sensed data to the reference data,
これは、前記画素の誤解を招くデプス値となり、リアルタイム車両撮影データと前記基準データとを関連付ける時に問題となり、
and could potentially be dangerous, as it is of critical importance to know with confidence how close objects are to the road.
道路に対して物体がどのくらい近いかを自信を持って知ることが極めて重要であるので、潜在的に危険であろう。
In contrast, the closest depth value or closest mode values are likely to relate to the tree, rather than the building, reflecting the true position of the closest object.
その一方、前記最も近いデプス値又は最も近い最頻値は、前記最も近い物体の真の位置を反映する、前記建物ではなく、前記木に関するものである可能性が高い。
//////
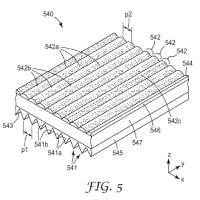
[0312] In a third example use case, as depicted in FIG. 27A, is a modification to the second example use case
【0199】
第3の例示的使用ケースでは、図27Aに描写されるように、第2の例示的使用ケースへの修正であり、
wherein laser reflectivity data of the reference data, which is in a channel of the depth map, can be used to construct a 3D point cloud or view that may be compared to a 3D point cloud or view based on images captured by one or more cameras.
そこでは、デプスマップのチャネルにある、基準データのレーザ反射率データは、1つ以上のカメラにより撮影された画像に基づいて3次元点群又はビューと比較されてもよい3次元点群又はビューを構築するために使用されうる。
US11263742(FULPRUF TECH CORPORATION [US])
This allows one robot to travel down a row of cars, taking photos of the left and right sides of that aisle and based on the GPS position of each photo, the software on the server can match those positions to images taken of the vehicle but
これにより、1台のロボットが車の列を下って移動し、その通路の左側と右側の写真を撮り、各写真のGPS位置に基づいて、サーバ上のソフトウェアは、それらの位置を、車両を撮影した画像と照合できるが、
already associated with the VIN number since those images were known to be associated with a particular VIN number after scanning of that VIN.
これらの画像は、そのVINをスキャンした後、特定のVIN番号に関連付けられていることが分かっているため、それらの位置は、既にVIN番号に関連付けられている。
US2023322167(MAGNA ELECTRONICS INC [US])
[0003] Use of imaging sensors in vehicle imaging systems is common and known. Examples of such known systems are described in U.S. Pat. Nos. 5,949,331; 5,670,935 and/or 5,550,677, which are hereby incorporated herein by reference in their entireties. Use of imaging sensors in vehicular trailer assist systems is common and known. Examples of such known systems are described in U.S. Pat. Nos. 9,446,713 and 9,085,261, which are hereby incorporated herein by reference in their entireties.
SUMMARY OF THE INVENTION
[0004] A driving assistance system or vision system or imaging system for a vehicle utilizes one or more cameras (preferably one or more CMOS cameras) to capture image data representative of images exterior of the vehicle(*車両の外部の画像), and provides control of a tailgate of the vehicle to limit or preclude fully opening the tailgate when a hitch (including a hitch ball mounted at an extending portion that is configured to be partially received at a hitch receiver of the vehicle) is attached at the hitch receiver of the vehicle.
US7310190(DELPHI TECH INC [US])
The present invention relates to an imaging system for use in a vehicle, in particular an imaging system including optics that permits the imaging system to image objects(*物体を撮影する)within the vehicle, a window of the vehicle, and objects spaced apart from the vehicle.
US8836784(INTELLECTUAL VENTURES FUND 83 LLC [US])
[0005] These digital camera systems are separately integrated as modules in vehicles, and are specialized, optimized and dedicated solely to the specific application of that particular system, such as one of the examples cited above. FIG. 1 shows a top view diagram of a prior art motor vehicle imaging system 100 including a motor vehicle 105 fitted with four digital camera imaging systems: a blind-spot imaging system including two blind-spot cameras 110 , one in each side view mirror; a forward-looking imaging system including a forward-looking camera 111 mounted on the front of the vehicle; an interior imaging system including an interior-view camera 112 mounted to view the driver and occupants of the vehicle; and a rear-view imaging system including a rear-view camera 113 mounted at the rear of the motor vehicle 105 . All four of the separately integrated digital camera systems do not interact or interconnect and are dedicated to perform specific functions.












※コメント投稿者のブログIDはブログ作成者のみに通知されます