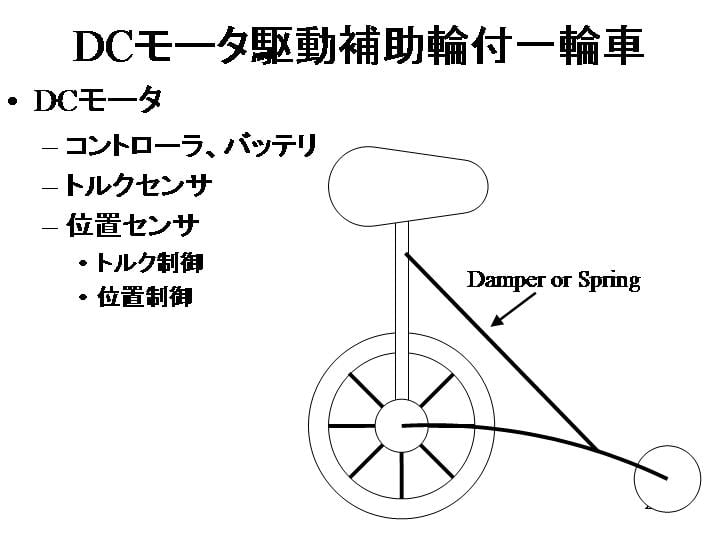
一輪車の制御については軸の部分にDCモーターを付けてトルクによる制御を当初考えていたが、大変大きなトルクが必要でモーターの大きさや電源の問題があるので図のようにダンパーかスプリングによる制御のみに変更された。
先日のインストラクターへのヒアリングによっても左右方向に倒れることは少ないとのことで、前後方向だけで良いということになっている。心理的には後ろ方向に倒れるのがより怖いので、この支えは恐怖感をかなり取り除いてくれるはずだ。いずれにしろ加速度センサーやモーションキャプチャによるデータから最適熟達(高速熟達)を探していくのはまだ先になりそうだ。
先日のインストラクターへのヒアリングによっても左右方向に倒れることは少ないとのことで、前後方向だけで良いということになっている。心理的には後ろ方向に倒れるのがより怖いので、この支えは恐怖感をかなり取り除いてくれるはずだ。いずれにしろ加速度センサーやモーションキャプチャによるデータから最適熟達(高速熟達)を探していくのはまだ先になりそうだ。