








US7991565
The base station 70 thus includes an antenna 78 and a data receive unit 72 (or alternatively other wireless communication technology, as known in the art) to collect data signals 45. Typically, the base station 70 corresponds to a well known facility located at the sporting area, such as a ski lodge. A base station computer 74 connects to the base station data receiver unit 72, via the bus 76, to collect and process data. As such, one sensing unit 10 of the invention simply includes one or more sensors 14 and enough control logic and processing capability to transmit data signals 45 to the base station 70, so that substantially all processing is done at the base station 70. This configuration is particularly useful for aspects of the invention such as speed skiing, where the sensing unit 10 is mounted with the speed skier's ski(*10がスキーに搭載される;"with"に違和感、"to", "on"は?), but where that user has no requirement to view the data until later, after the run (or where instructors or judges primarily use the data). However, as discussed above, that speed skier can also use a data unit 50 with headphones 60 to acquire a real-time feedback of unwanted airtime, such as through an audible sound, so as to correct his or her form while skiing. In one aspect, the base station 70 preferably has the capability to collect, analyze and store performance data on a server 82 for later review.
US7194358
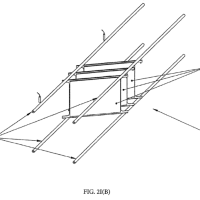
Attached to the upper corner 6 of the basket 7 at the back end 3 is a compound corner module 108. This compound corner module 108, by way of example not limitation, is mounted on(*上に搭載されている)the upper corner 6 on a diagonal bracket 106 projecting diagonally outward and upward from the upper corner 6 at the back end 3 of the basket 7 at an angle β of approximately 45°. This places the compound corner module 108 outside and to the rear of(*の後部、後に)the rear end 3 vertical rail 10, as well as above the top rail 8. The compound corner module 108, in this exemplary embodiment, is also in the form of a cube with different sensor units on different faces. In this exemplary embodiment, the compound corner unit 108 is mounted with an optical proximity detector 150(*108には150が搭載、実装されている;108は150を搭載、実装している)with(*状態で)its proximity detection region 52(*152)directed vertically upward.

US20150268469
The machine vision system 30 may be any suitable device such as may be worn by the user, for example, in a helmet configuration or as interactive glasses (e.g., wearable device having Google Glass). However, it should be appreciated that the machine vision system 30 may be embodied as or include or interface with a hand carried or portable device, such as a tablet type device or portable/laptop computer. It also should be noted that in various embodiments the machine vision system 30 also includes an image recording device 32 (e.g., a camera or video recording device) that forms part of or is mounted with the machine vision system 30(*32が30に搭載、実装された;取り付けられている?"to", "on"は?). The image recording device 32 is configured to acquire images (e.g., still or video images) of the article 28 and/or the surrounding components (or environment). For example, the image recording device 32 may be mounted or aligned with the user 22 to provide line of sight visualization. The image recording device 32 in some embodiments also includes memory or storage capabilities to store acquired images, for example, temporarily until communicated to the interactive production illustration system 24.

US10935040
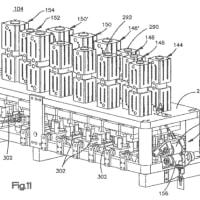
Adjustment of the position of the motor shaft 122 is accomplished in the fan mount assembly 12 by providing a movable motor mounting bracket 130 to which the motor 14 is mounted with(*手段のwith)motor mounting bolts 132 and motor mounting nuts 134 or other appropriate fastening means.
US9855661
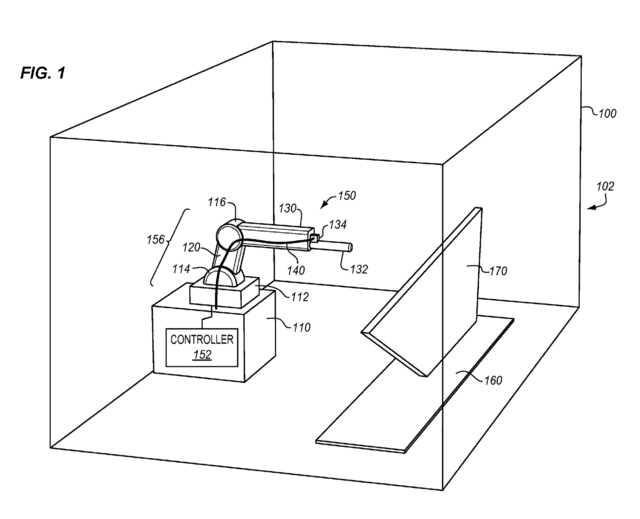
In order to prevent end effector 132 from colliding with other objects in manufacturing cell 100, imaging system 134 is mounted with(*に搭載されている、取り付けられている)end effector 132 (e.g., mounted to end effector 134(*132), or mounted to rigid body 130). Imaging system 134 scans space surrounding end effector 134 in order to generate 3D point clouds and prevent collisions. Furthermore, imaging system 134 is capable of utilizing a mirror (FIG. 2, 200) to accurately determine the volume occupied by robot 150, including any dressing 140 (e.g., power cabling, hydraulic hoses, etc.) attached to robot 150. In this manner, when robot 150 is moved via joint space instructions sent to actuators 112, 114, and 116, it is moved with an understanding of how that movement could result in collisions with other objects within manufacturing cell 100. Controller 152 may calculate volume information based upon input from imaging system 134, and may utilize this information when directing actuators 112, 114, and 116 in order to avoid collisions. Imaging system 134 may comprise a Light Detection and Ranging (LIDAR) system, a 3D scanner, or a 2D camera whose input (when considered with a nominal 3D model of robot 150) is utilized to calculate 3D positions, or any other suitable imaging system.










※コメント投稿者のブログIDはブログ作成者のみに通知されます