PID制御、これら3個のパラメータを少しずつ変えて何とか倒立状態を維持することが出来るようになりました。
床に垂直に立たせて電源スイッチON、そっと手を放します。最初は少し動き回りますが、其のうちある位置でほぼ停止(倒立状態)していますが、また、暫くすると少し動き回ります。其の後は、この停止と動きの繰り返しになります。壁に突き当たってもひっくり返ることはなくなりました。
倒立を維持する上で重要なのは電池です。今回は新しい乾電池と入れ替えました。これはもっと電流容量のある充電できる電池を使うべきかと思います。電池の電圧が下がってきますと倒立を維持するのは難しくなります。





また、両輪を駆動するモータの差により適当に回転をする現象がでます。電源を入れ、其の位置でピタっと倒立停止が出来れば期待通りですが、さらにPIDの係数を微調整する必要があります(果たしてそれだけで実現できるかは?疑問です)
最終的には赤外線センサと赤外線リモコンで前進、後進、回転できればと考えています。(どちらが前か後ろか分かりませんが)
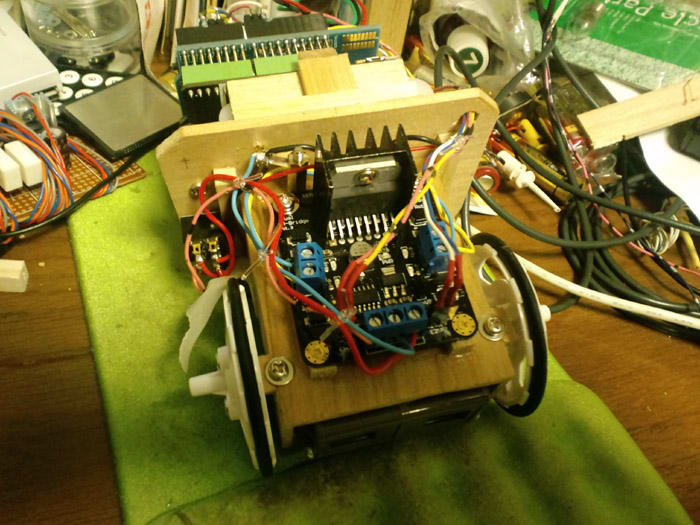
筐体の高さを低くしたのはある意味正解かも知れません。