








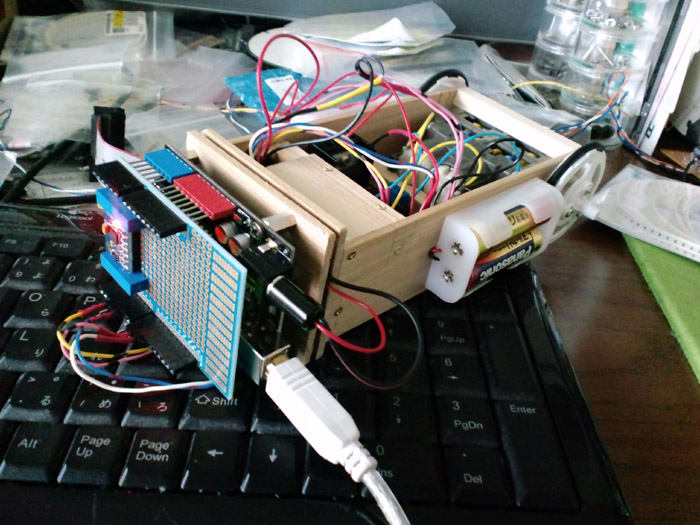
プログラムを修正し、モータの配線が逆なのを直して取り合えず、手で直立状態にするとモータが停止、傾けるとモータが其れを元へ戻す方向へ回転するようになりました。
しかし、倒立状態を維持できません。元になったプログラムとはモータ(ギヤを含めて)が違います、当然トルクも異なり原因を探るのはかなり大変そうです。元プログラムにはRCの部分が含まれて居ます、其の部分はコメントにしないと動きが余計におかしくなります。
手で支えながらですと何とか倒立できる感じです。動きを見ていると、傾いて其れを元へ戻す為に傾いた方向へ走り(動くと言うほうが適切かな)出しますが、姿勢を元へ立て直せず転倒してしまいます。かなり速く動かないと姿勢が元へ戻せない印象です。
プログラム中のパラメータを私の作ったハードに合うようにする必要が有るようです。キットの説明動画ではかなり調子よく動いています。
USB経由のUARTでPCで実際の値は見ることが出来るのですが、、、キットを作って実際の値を見て見たいですね。
2015/1/31(Sat)
色々パラメータを変えてみるが、どうもうまく行かないですね。暫く棚上げかな。
















