








EP3716144
[0035] FIGs. 4A and 4B illustrate geo-registration of classified objects, according to example implementations of the present disclosure.
【0036】
図4A及び図4Bは、本開示の例示的な実施態様による、分類された物体の地理登録を示している。
The geo-registration module 1024 can register the detected and classified objects and their trajectories against a geo-referenced world map such as Google Maps.
地理登録モジュール1024は、グーグルマップなどの地理参照世界地図に対して、検出され分類された物体及びそれらの軌跡を登録することができる。
The geo-registration module can use a perspective transformation between video frames and the map.
地理登録モジュールは、映像フレームとマップの間の透視変換(perspective transformation)を使用することができる。
FIG. 4A illustrates an example that the video feed is from a stationary camera.
図4Aは、映像フィードが静止したカメラからのものである一例を示している。
In this example, the transformation between video frames and the map can be computed from a set of landmark points manually specified by a user (e.g., through the GUI 1041).
この実施例では、映像フレームとマップの間の変換が、(例えば、GUI1041を介して)ユーザによって手動で指定された一組のランドマークポイントから計算され得る。
For example, the user can enter a set of point correspondences between an image captured by the stationary camera and the map.
例えば、ユーザは、静止したカメラよってキャプチャされた画像とマップと間の一組のポイント対応を入力することができる。
As shown, the GUI can present a camera-captured image 401 and an overhead view of a map 402.
図示されているように、GUIは、カメラがキャプチャした画像401、及びマップの俯瞰図402を提示することができる。
The user can enter lines (e.g., line 403) indicating the point correspondences between the image 401 and the overhead view of the map 402.
ユーザは、画像401とマップの俯瞰図402との間のポイント対応を示す線(例えば、線403)を入力することができる。
Each line can connect one point in the image and its corresponding point on the map.
各線は、画像内の1つのポイントを、マップ上のその対応するポイントに接続することができる。
Then the geo-registration module can compute a homographic transformation from the image to the map.
次いで、地理登録モジュールは、画像からマップへのホモグラフィック(homographic)変換を計算することができる。
US2019042944
[0023] FIG. 1 provides a high level block diagram of an illustrative system 100 that includes
【0016】
図1は、本明細書に記載の少なくとも1つの実施形態に係る、
a neural network 110, processor circuitry 130 to provide a training tensor 150 to the neural network 110,
ニューラルネットワーク110と、ニューラルネットワーク110に訓練テンソル150を提供するためのプロセッサ回路130と、
and a storage device 170 to store instructions executed by the processor circuitry 130, in accordance with at least one embodiment described herein.
プロセッサ回路130により実行される命令を格納するための記憶デバイス170とを含む例示的システム100の俯瞰ブロック図を提供する。
The training tensor 150 includes a plurality of 16-bit floating point values 1521-152n (collectively, “16-bit floating point values 152”) and an exponent 154 that is common to and shared by each of at least some of the 16-bit floating point values 152.
訓練テンソル150は、複数の16ビット浮動小数点値1521~152n(まとめて「16ビット浮動小数点値152」)と、16ビット浮動小数点値152の少なくとも一部の各々に共通し、それら各々により共有される指数154とを含む。
In embodiments, the processor circuitry 130 generates or causes the generation of the training tensor 150 used to train (e.g., set the weighting and/or biasing of) the neural network 110.
実施形態において、プロセッサ回路130は、ニューラルネットワーク110を訓練する(例えば、その重み付けおよび/またはバイアスを設定する)ために用いられる訓練テンソル150を生成する、またはその生成を引き起こす。
In embodiments, execution of instructions stored in, on, or about the storage device 170 may cause the processor circuitry 130 to forward propagate and/or backwards propagate the training tensor 150 through the neural network 110.
実施形態において、記憶デバイス170内、記憶デバイス170上、または記憶デバイス170の周辺に格納される命令の実行は、プロセッサ回路130に、訓練テンソル150をニューラルネットワーク110を通して順伝播および/または逆伝播させてよい。
EP2409273
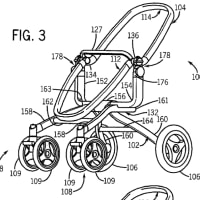
[00130] Figure 9 shows an overhead view of an exemplary establishment layout for a multi-zone jukebox system, in accordance with one embodiment of the invention.
【0056】
図9は、本発明の一実施形態に係るマルチゾーンジュークボックスシステムの典型的な施設のレイアウトの俯瞰図を示している。
In accordance with an exemplary embodiment, the establishment has three zones 121 , 123, 125.
本実施形態では、施設は3つのゾーン121、123および125を備えている。
Each zone is equipped with its own set of speakers 127, 129, 131, which are operably connected to the jukebox 133.
各ゾーンには、自ゾーンのスピーカー127、129および131が備え付けており、ジュークボックス133に操作可能に接続されている。
Different music may be played simultaneously in all three zones 121, 123, 125 and all the music may be played from a single jukebox 133(*不定冠詞;jukebox 133は既出だが「単一のジュークボックス」は初出).
異なる音楽が3つのゾーン全てで同時に再生されてもよいし、すべての音楽が単一のジュークボックス133から再生されてもよい。
The jukebox 133 may be provided with additional hardware, as needed, to allow this implementation.
ジュークボックス133には、必要に応じて、このような実装が可能な追加のハードウェアが設けられてもよい。
WO2019023697
[0139] For example, in various embodiments, the visual display can present a bird's eye view (not shown) of the autonomous vehicle.
【0139】
例えば、様々な実施形態において、視覚ディスプレイは、自律車両の俯瞰映像(図示せず)を提示できる。
Referring also to FIG. 15, in various embodiments, an autonomous aerial vehicle 410 can be associated with one or more autonomous land vehicles 420
さらに図15を参照すると、様々な実施形態において、自律航空機410が、1または複数の自律陸上車両420と関連付けられてよく、
and can capture images or videos of the autonomous land vehicle 420 from a bird's eye perspective.
俯瞰的な視点から自律陸上車両420の画像または動画をキャプチャできる。
The captured images or videos can be communicated to the remote human operator system 300 for display on a visual interface 330.
キャプチャされた画像または動画は、視覚インターフェース330上に表示するために、リモート人間オペレータシステム300に通信されうる。
In this manner, the bird's eye perspective allows the human operator to easily visualize the surrounding environment of the autonomous vehicle 420
このように、俯瞰的な視点により、人間オペレータは、自律車両420の周囲環境を見ることが容易になることで、
to better operate the autonomous vehicle 420 remotely.
リモートで自律車両420をより良好に操作できる。
WO2018093450
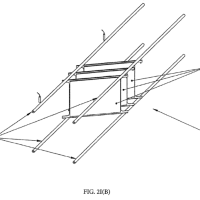
[0066] FIG. 3 depicts an overhead-view of an aerial vehicle 300, in accordance with an implementation.
【0061】
図3は、一実施態様による航空機300の俯瞰図を示す。
The aerial vehicle 300 includes a perimeter frame 399 that includes a front 392, a first side 394, a rear 396, and a second side 398.
航空機300は、前部392、第1の側部394、後部396、及び第2の側部398で構成される外周フレーム399を含む。
In this example, the perimeter frame 399 is rectangular-shaped, but other sizes and shapes are possible.
本例では、外周フレーム399は長方形であるが、他のサイズ及び形状もあり得る。
The aerial vehicle 300 also has a middle region 320 that may be located within the front 392, the first side 394, the rear 396 and the second side 398.
航空機300はまた、前部392、第1の側部394、後部396及び第2の側部398の内側に配置され得る中間領域320を有する。
For example, the middle region 320 may correspond to a region defined by a radius (e.g., 5 inches) extending away from a center of mass(*不定冠詞;唯一特定だろうから定冠詞でもOKでは?単に初出だから?)or a center of volume of the aerial vehicle 300.
例えば、中間領域320は、航空機300の質量中心または体積中心から延びる半径(例えば、5インチ)によって画定される領域に対応し得る。












※コメント投稿者のブログIDはブログ作成者のみに通知されます