








昨夜はシーイングは良いものの透明度が悪く、SonyTRV900の
シャッター速度を通常の1/60秒から1/30秒に落として光量を稼ぎ
撮影しました。
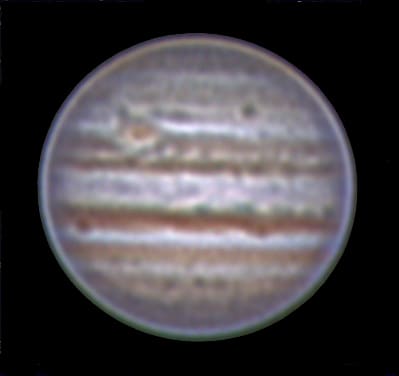
大きな揺らぎはあるものの、小さな揺らぎは少なく、カメラモニタでも
大赤斑の下(北)が白くなっているのが分かりました。
透明度がよければもう少し細部が出たと思いますが、その割には発色は
好みの色になりました。
Registaxで強めの処理すると円周に沿ってリングが発生するのが気に
なります。画像復元最大エントロピー法でそれが更に強調されるようです。
同じ素材ですが、2枚目が眼視イメージに近い自然な感じです。
Registax4で強めの処理

Registax4で弱めの処理
【木星】
2008/07/06 00h21m50s~00h23m41s
NGT-12.5 D317mm FL1420mm
Sony TRV900
Pentax XP-14mm 、露出1/30秒
自作ソフトで2679フレームコンポジット後、
Registax4、ステライメージ、PhotoShopで処理
シャッター速度を通常の1/60秒から1/30秒に落として光量を稼ぎ
撮影しました。
大きな揺らぎはあるものの、小さな揺らぎは少なく、カメラモニタでも
大赤斑の下(北)が白くなっているのが分かりました。
透明度がよければもう少し細部が出たと思いますが、その割には発色は
好みの色になりました。
Registaxで強めの処理すると円周に沿ってリングが発生するのが気に
なります。画像復元最大エントロピー法でそれが更に強調されるようです。
同じ素材ですが、2枚目が眼視イメージに近い自然な感じです。
Registax4で強めの処理
Registax4で弱めの処理
【木星】
2008/07/06 00h21m50s~00h23m41s
NGT-12.5 D317mm FL1420mm
Sony TRV900
Pentax XP-14mm 、露出1/30秒
自作ソフトで2679フレームコンポジット後、
Registax4、ステライメージ、PhotoShopで処理



