








ひと昔前は,ITARによる輸出入規制のおかげで,high altitude balloonに
搭載するGPS受信機を見つけるのに苦労しましたが,今では我らが
u-bloxのおかげで,一発解決です.
u-bloxのGPS受信機には,航空機向けのAirborneというモードがあり,
この設定にすると,公式には高度50kmまでの測位を保証しています.
u-blox 6 Receiver Description and Protocol Specification (2.1 Platform settings参照)
気象観測用のゴム気球が到達する高度は,せいぜい30km程度なので,
HABの実験には問題なく利用できます.高高度気球の到達高度の
世界記録であっても,高度50kmを少し超える程度です.
しかし,実際にはどのまで測位を続けるのか興味があり,
GPS信号シミュレータを使用して,u-bloxの最大高度を確認してみました.
HABの上昇速度は最大でも10m/s程度ですが,そんなにのんびりした速度では
シミュレーションに時間がかかるので,Airborneモードの最大速度である
500m/sで,高度100kmまで垂直上昇する飛行機のシナリオを実行します.
(そんな芸当のできる飛行機は存在しませんが…)
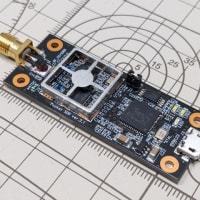
使用した受信機はu-bloxのLEA-6T.ファームウェアのversionは7.03です.
後処理もできるよう,出力はubxフォーマットで,NAV-SOL,NAV-SVINFO,
RXM-RAW,RXM-SFRBを記録しました.
 (クリックで拡大)
(クリックで拡大)
仕様通りに,ITARの高度制限である60,000フィート(約18km)を超えても測位を
続けています.そのまま公式の高度制限である50kmも超え,80kmで測位フラグが
No Fixになりました.しかし,その後もしばらく測位を続け,高度85kmに到達すると
測位結果の出力が停止しました.
さて,ここで出力を停止するのは,あくまでも測位結果です.実はこの後もRAWデータは
出力され続けます.そのため,後処理で疑似距離から測位演算を行うと,シミュレータの
シナリオ通りに,高度100kmまで測位が可能になります.
 (クリックで拡大)
(クリックで拡大)
これならロケットや衛星だって問題ないじゃないかと期待するのですが,残念ながら
速度制限に引っかかると,RAWデータの出力も停止します.また,信号捕捉における
ドップラ周波数の検索範囲も,衛星軌道の速度に対応できるほど広くありません.
いずれにせよ,気球実験では問題なく動作しそうですので,ご活用ください.
【追記】ubx出力のログをアップしておきます.興味のある方は後解析にどうぞ.
http://www.sensorcomm.co.jp/osqzss/ublox/
【追記2】ふと気付いたのだが,どうやら速度制限によってRAWが停止するのは,
測位演算によって速度が求められてからのようだ.信号を捕捉しても,放送歴を
取得するまでに数十秒必要なので,それまでは測位することが出来ず,RAWだけが
出力されている.それならば,無理やり測位できない設定にすれば,高度・速度の
規制に関係なく,RAWを出力し続けるのではないだろうか?測位演算のための
マスクのどれかを無茶な値にすれば良い気がする.DOPあたりはどうだろう?
どんな衛星配置でも実現しないような小さな値にするとか.早速試してみよう.
搭載するGPS受信機を見つけるのに苦労しましたが,今では我らが
u-bloxのおかげで,一発解決です.
u-bloxのGPS受信機には,航空機向けのAirborneというモードがあり,
この設定にすると,公式には高度50kmまでの測位を保証しています.
u-blox 6 Receiver Description and Protocol Specification (2.1 Platform settings参照)
気象観測用のゴム気球が到達する高度は,せいぜい30km程度なので,
HABの実験には問題なく利用できます.高高度気球の到達高度の
世界記録であっても,高度50kmを少し超える程度です.
しかし,実際にはどのまで測位を続けるのか興味があり,
GPS信号シミュレータを使用して,u-bloxの最大高度を確認してみました.
HABの上昇速度は最大でも10m/s程度ですが,そんなにのんびりした速度では
シミュレーションに時間がかかるので,Airborneモードの最大速度である
500m/sで,高度100kmまで垂直上昇する飛行機のシナリオを実行します.
(そんな芸当のできる飛行機は存在しませんが…)
使用した受信機はu-bloxのLEA-6T.ファームウェアのversionは7.03です.
後処理もできるよう,出力はubxフォーマットで,NAV-SOL,NAV-SVINFO,
RXM-RAW,RXM-SFRBを記録しました.
 (クリックで拡大)
(クリックで拡大)仕様通りに,ITARの高度制限である60,000フィート(約18km)を超えても測位を
続けています.そのまま公式の高度制限である50kmも超え,80kmで測位フラグが
No Fixになりました.しかし,その後もしばらく測位を続け,高度85kmに到達すると
測位結果の出力が停止しました.
さて,ここで出力を停止するのは,あくまでも測位結果です.実はこの後もRAWデータは
出力され続けます.そのため,後処理で疑似距離から測位演算を行うと,シミュレータの
シナリオ通りに,高度100kmまで測位が可能になります.
 (クリックで拡大)
(クリックで拡大)これならロケットや衛星だって問題ないじゃないかと期待するのですが,残念ながら
速度制限に引っかかると,RAWデータの出力も停止します.また,信号捕捉における
ドップラ周波数の検索範囲も,衛星軌道の速度に対応できるほど広くありません.
いずれにせよ,気球実験では問題なく動作しそうですので,ご活用ください.
【追記】ubx出力のログをアップしておきます.興味のある方は後解析にどうぞ.
http://www.sensorcomm.co.jp/osqzss/ublox/
【追記2】ふと気付いたのだが,どうやら速度制限によってRAWが停止するのは,
測位演算によって速度が求められてからのようだ.信号を捕捉しても,放送歴を
取得するまでに数十秒必要なので,それまでは測位することが出来ず,RAWだけが
出力されている.それならば,無理やり測位できない設定にすれば,高度・速度の
規制に関係なく,RAWを出力し続けるのではないだろうか?測位演算のための
マスクのどれかを無茶な値にすれば良い気がする.DOPあたりはどうだろう?
どんな衛星配置でも実現しないような小さな値にするとか.早速試してみよう.












※コメント投稿者のブログIDはブログ作成者のみに通知されます