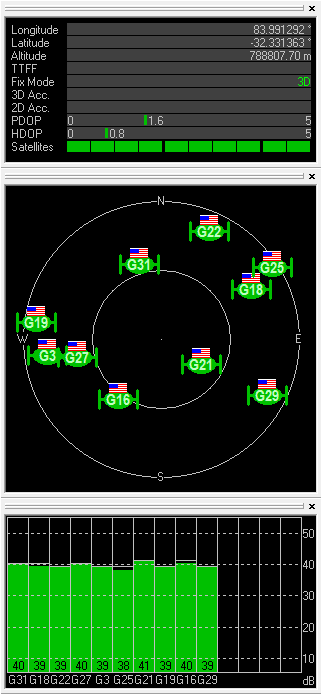
どうやらこの受信機,測位演算が最小二乗法ではなく
カルマンフィルタのようだ.
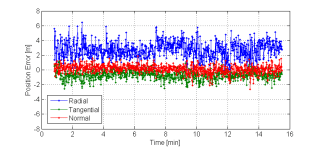
もともと車程度のダイナミクスを想定しているため,
衛星軌道での速度となると,不要なオフセットが発生してしまう.
確認のために,GPS信号シミュレータで太陽同期軌道のシナリオを実行.
 (クリックで拡大)
(クリックで拡大)
ファームウェアの改修で随分とオフセットが減少したけれど,
まだ数mほどradial方向に残っている.
ここまできたら,これも何とかしたい.
 (クリックで拡大)
(クリックで拡大)
それでも,衛星軌道でのコールドスタートで,
1分以内に測位が開始されるのはすばらしい.
これだけでも,かんばる価値がある!
カルマンフィルタのようだ.
もともと車程度のダイナミクスを想定しているため,
衛星軌道での速度となると,不要なオフセットが発生してしまう.
確認のために,GPS信号シミュレータで太陽同期軌道のシナリオを実行.
 (クリックで拡大)
(クリックで拡大)ファームウェアの改修で随分とオフセットが減少したけれど,
まだ数mほどradial方向に残っている.
ここまできたら,これも何とかしたい.
 (クリックで拡大)
(クリックで拡大)それでも,衛星軌道でのコールドスタートで,
1分以内に測位が開始されるのはすばらしい.
これだけでも,かんばる価値がある!