MOMO3号機の打ち上げ成功,おめでとうございます!
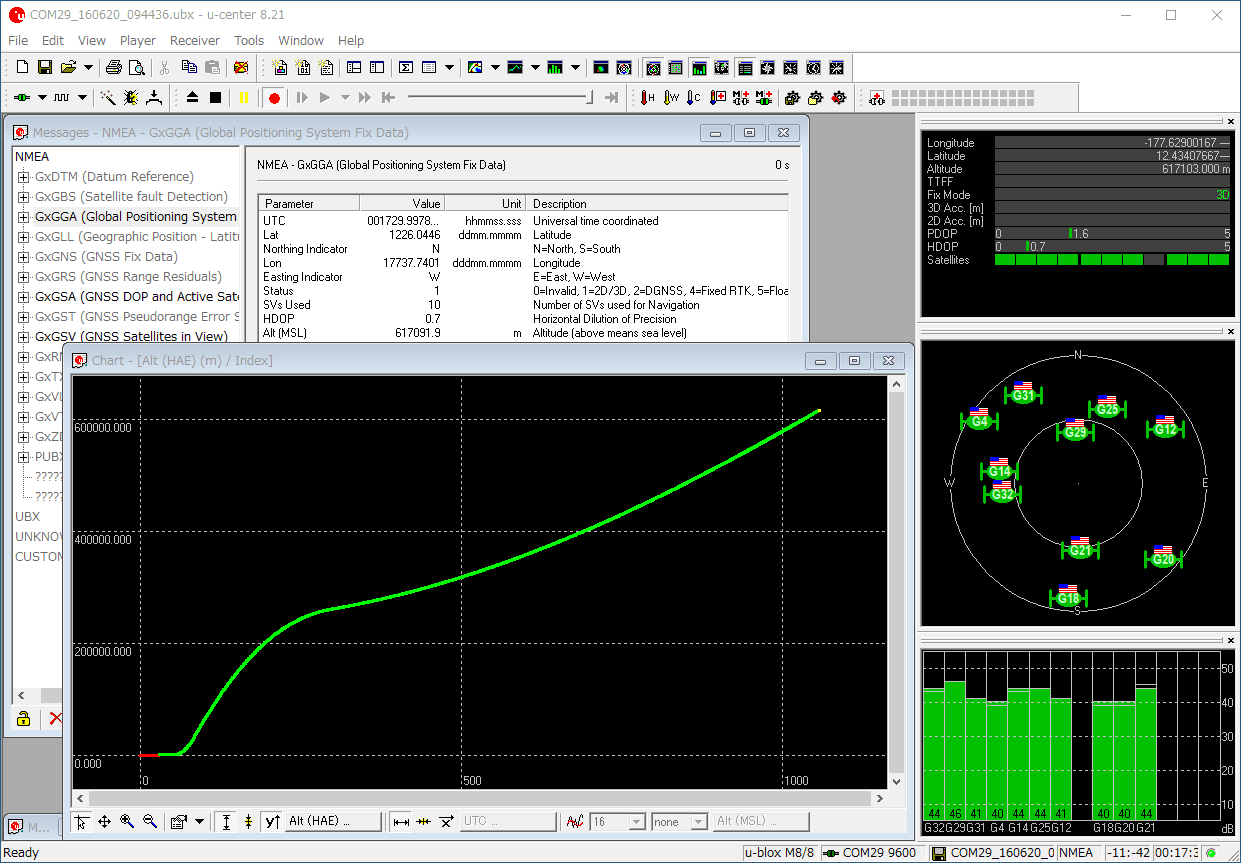
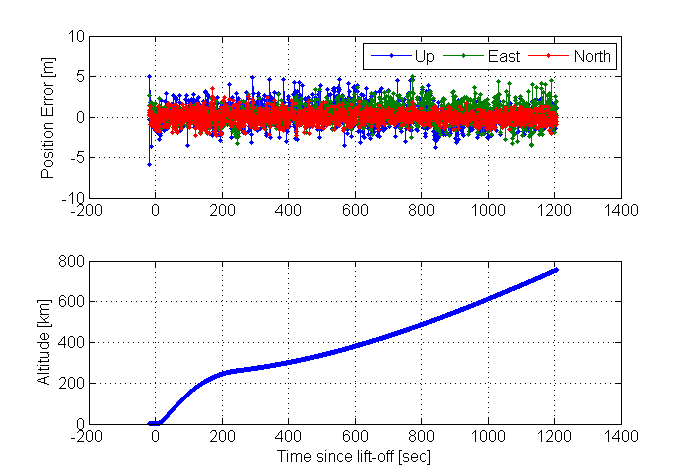
今回,高度100kmのカーマンラインを超え,宇宙に到達したわけですが,
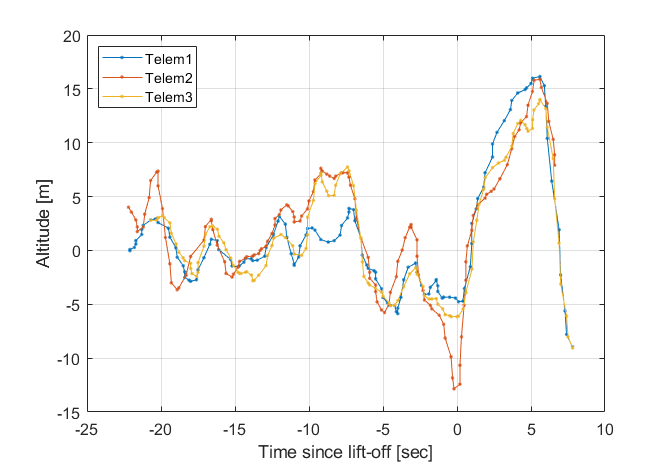
この高度を計測したのが,MOMOに搭載されたFirefly GNSS受信機です.

これまでの大型ロケットの打ち上げでは,ロケットが計画通りの
コースを飛行しているのか監視する飛行安全業務のために,
専用の地上観測レーダを用いていました.
しかし,維持のためのコストが膨大なレーダ局を廃止して,
代わりにGPS/GNSSを利用するのが世界的な流れになっています.
また,小型ロケットを開発しているベンチャー企業が自前の
レーダ局を持つことも難しいため,ロケット搭載用GNSS受信機は
MOMOなどの小型ロケットを安全に飛行させるために必須の技術となります.
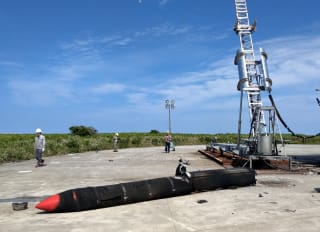
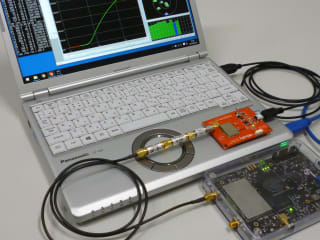
MOMOには,2台のFireflyが搭載されているようです.エンジンの動画や
写真に比べると,ほとんど情報のないMOMOのアビオニクスですが,
@katogomaさんのtwitterに1号機の写真が投稿されています.

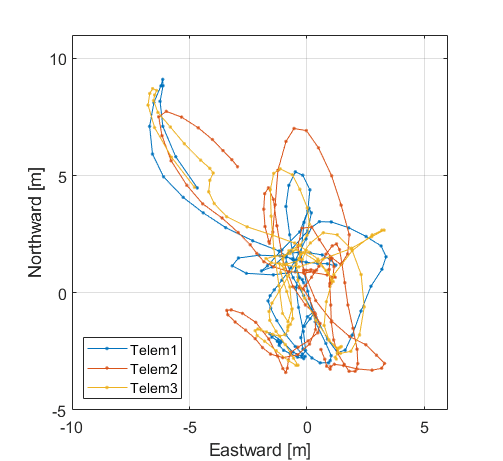
Fireflyが提供するロケットの位置情報は,テレメトリとして地上局に
送られます.地上局では,この情報をもとに,「いまエンジンを停止した
ときにロケットが落下する位置」をリアルタイムで計算します.
この落下位置予測のことをIIP(Instantaneous Impact Point)と呼びます.
地上局では,このIIPが飛行安全区域内であることを常に監視しています.
IIPが飛行安全区域外に出るようなことがあれば,エンジンを緊急停止し,
強制的に安全区域内にロケットを落下させます.
Qiita: ロケットの瞬間落下点の計算(OpenVerne)
何事もなく,無事にエンジンの燃焼が終われば,観測ロケットであるMOMOは
自由落下になります.そうなれば,もう飛行経路を制御することはできませんので,
飛行安全の役目も終わりです.
しかし,地球周回の衛星打ち上げを目指すZEROでは,さらにペイロードを
希望する軌道に投入するために,最上段の誘導制御が必要になります.
当然,このときにもロケットの位置情報は必須となります.
MOMOの飛行安全に加えて,ZEROの誘導制御でもFirefly GNSS受信機が
活躍してくれることを期待しています.
【追記】アビオニクスの情報が少ないと書いたら,超電磁Pに叱られた.
トランジスタ技術2019年1月号を読もう!

今回,高度100kmのカーマンラインを超え,宇宙に到達したわけですが,
この高度を計測したのが,MOMOに搭載されたFirefly GNSS受信機です.
これまでの大型ロケットの打ち上げでは,ロケットが計画通りの
コースを飛行しているのか監視する飛行安全業務のために,
専用の地上観測レーダを用いていました.
しかし,維持のためのコストが膨大なレーダ局を廃止して,
代わりにGPS/GNSSを利用するのが世界的な流れになっています.
また,小型ロケットを開発しているベンチャー企業が自前の
レーダ局を持つことも難しいため,ロケット搭載用GNSS受信機は
MOMOなどの小型ロケットを安全に飛行させるために必須の技術となります.
MOMOには,2台のFireflyが搭載されているようです.
写真に比べると,ほとんど情報のないMOMOのアビオニクスですが,
@katogomaさんのtwitterに1号機の写真が投稿されています.
Fireflyが提供するロケットの位置情報は,テレメトリとして地上局に
送られます.地上局では,この情報をもとに,「いまエンジンを停止した
ときにロケットが落下する位置」をリアルタイムで計算します.
この落下位置予測のことをIIP(Instantaneous Impact Point)と呼びます.
地上局では,このIIPが飛行安全区域内であることを常に監視しています.
IIPが飛行安全区域外に出るようなことがあれば,エンジンを緊急停止し,
強制的に安全区域内にロケットを落下させます.
Qiita: ロケットの瞬間落下点の計算(OpenVerne)
何事もなく,無事にエンジンの燃焼が終われば,観測ロケットであるMOMOは
自由落下になります.そうなれば,もう飛行経路を制御することはできませんので,
飛行安全の役目も終わりです.
しかし,地球周回の衛星打ち上げを目指すZEROでは,さらにペイロードを
希望する軌道に投入するために,最上段の誘導制御が必要になります.
当然,このときにもロケットの位置情報は必須となります.
MOMOの飛行安全に加えて,ZEROの誘導制御でもFirefly GNSS受信機が
活躍してくれることを期待しています.
【追記】アビオニクスの情報が少ないと書いたら,超電磁Pに叱られた.
トランジスタ技術2019年1月号を読もう!