Phantom 2はフライトコントローラにNAZAを搭載しているみたいだけど,
Phantom 3以降は専用の一体型基板になり,GPS受信機も別物になっている.
DJIが情報を公開していないので,NAZAのGPS同様に通信プロトコルは不明.
しかし,分解された受信機の画像を見る限り,NAZAのGPSのように通信を
制御するマイコンらしきものは見当たらない.

受信機はu-bloxのNEO-6Qのようだ.これ,普通に直結されているのかな?
5本のケーブルの内,2本が電源,2本がTX/RX,もう一本がPPSだろうか.
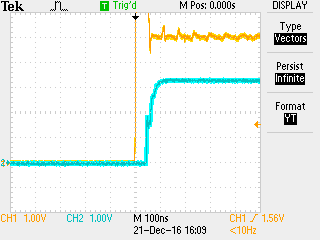
Phantom 3の接続先を見ると,TXとRXのテスト用パッドがある.

まずはこれを使ってGPS受信機からの出力を確かめてみよう.
NMEAやUBXそのものだと嬉しいな.
【追記】コネクタはmolexらしい.
51021-0500: 1.25mm Pitch PicoBlade Wire-to-Wire and Wire-to-Board Housing, Female, 5 Circuits
53398-0571: 1.25mm Pitch PicoBlade Header, Surface Mount, Vertical, 5 Circuits
【追記2】ロシアのWikiで
情報発見.以下,Google翻訳を抜粋.
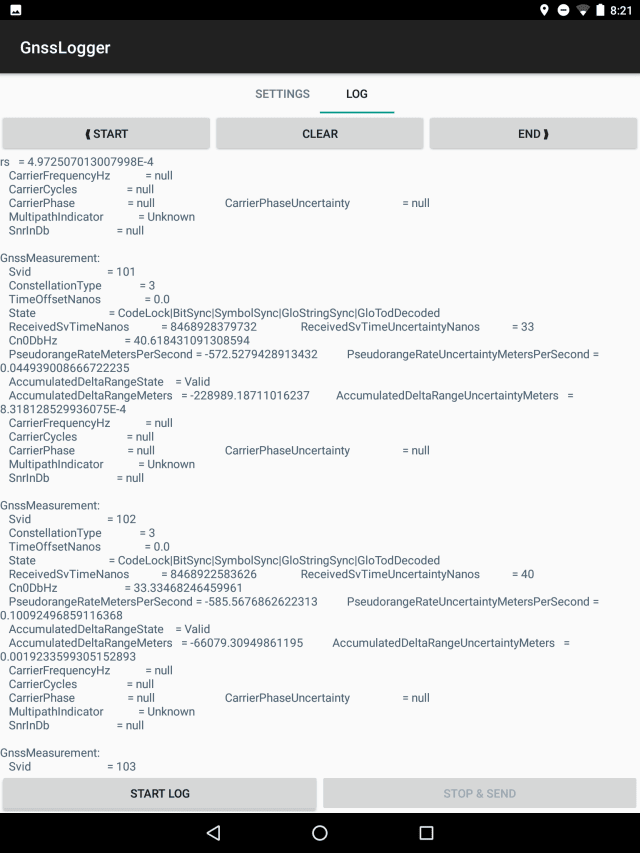
"The GPS is used as the U-Blox NEO M8N. Works in NMEA/9600 after the start,
then software converts it into UBX/115200, the frequency of 5Hz.
5-pin connector the Molex PicoBlade, power is derived only 3.6V"
この情報が正しければ,Phantom 3の受信機をM8Tに置き換えて,
RAWデータのログ機能を追加するのはそれほど難しくない.
ただ,NMEAからUBXの切り替えはちょっと気になる.
これ,最初からUBXじゃダメなのかな?