宇宙機搭載用GPS/GLONASS受信機のfireflyは,測位結果をNMEAで提供します.
誰でも気軽に使えるよう,汎用的なフォーマットを選んだのですが,
そもそもNMEAが宇宙機での運送を想定したものでないため,
いろいろと不便もあります.
一番の問題は速度ベクトルが得られないことです.位置ベクトルは,緯度,
経度,高度から変換できるのですが,NMEAで提供される速度は対地速度と
方位角のため,地表に対する水平方向の情報しかありません.
高速で飛翔する衛星やロケットの運用では,速度情報も重要になるため,
ECEF座標系での位置・速度ベクトルを出力して欲しいという要望が多く
ありました.
予算や時間の関係で実装をあきらめていたバイナリフォーマットですが,
ユーザからのリクエストに答えるべく,開発に着手しました.
fireflyの開発では,動作検証のためにGPS信号シミュレータを確保するのに
一苦労でしたが,今回は自作シミュレータのbladeGPSがあります.
衛星軌道でのシミュレーションも,これで簡易的に実施できます.
現行のfireflyでは,バイナリ出力の検証をしておらず,動作が保証できません.
測位精度を確認すると,30mほどのオフセットが見られます.
これは主に,測位結果の時間タグの精度によるものです.
fireflyのバイナリ出力に含まれる時間タグの単位は,1/100秒となっています.
これは車など,地上の移動体であれば十分な精度なのですが,
秒速7kmで飛翔する衛星では70mもの位置誤差となってしまいます.
その他,いろいろと細かなアップデートを行った新しいファームウェアでの
測位精度を,bladeRFによる衛星シナリオで評価してみました.
 (クリックで拡大)
(クリックで拡大)
 (クリックで拡大)
(クリックで拡大)
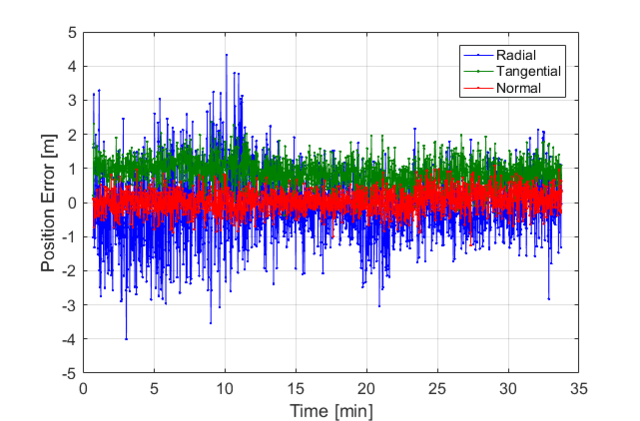
位置精度はNMEAと同様に数m,速度精度は1m/s程度と,衛星軌道での高速な
受信環境であっても,通常の測位で期待できる精度が得られています.
とりあえず動作に問題はなさそうですが,残念ながらbladeRFではGPS信号しか
シミュレーションできません.
どこかでGPS/GLONASSのシミュレータを借りられないかな.求む,スポンサー!
誰でも気軽に使えるよう,汎用的なフォーマットを選んだのですが,
そもそもNMEAが宇宙機での運送を想定したものでないため,
いろいろと不便もあります.
一番の問題は速度ベクトルが得られないことです.位置ベクトルは,緯度,
経度,高度から変換できるのですが,NMEAで提供される速度は対地速度と
方位角のため,地表に対する水平方向の情報しかありません.
高速で飛翔する衛星やロケットの運用では,速度情報も重要になるため,
ECEF座標系での位置・速度ベクトルを出力して欲しいという要望が多く
ありました.
予算や時間の関係で実装をあきらめていたバイナリフォーマットですが,
ユーザからのリクエストに答えるべく,開発に着手しました.
fireflyの開発では,動作検証のためにGPS信号シミュレータを確保するのに
一苦労でしたが,今回は自作シミュレータのbladeGPSがあります.
衛星軌道でのシミュレーションも,これで簡易的に実施できます.
現行のfireflyでは,バイナリ出力の検証をしておらず,動作が保証できません.
測位精度を確認すると,30mほどのオフセットが見られます.
これは主に,測位結果の時間タグの精度によるものです.
fireflyのバイナリ出力に含まれる時間タグの単位は,1/100秒となっています.
これは車など,地上の移動体であれば十分な精度なのですが,
秒速7kmで飛翔する衛星では70mもの位置誤差となってしまいます.
その他,いろいろと細かなアップデートを行った新しいファームウェアでの
測位精度を,bladeRFによる衛星シナリオで評価してみました.
 (クリックで拡大)
(クリックで拡大)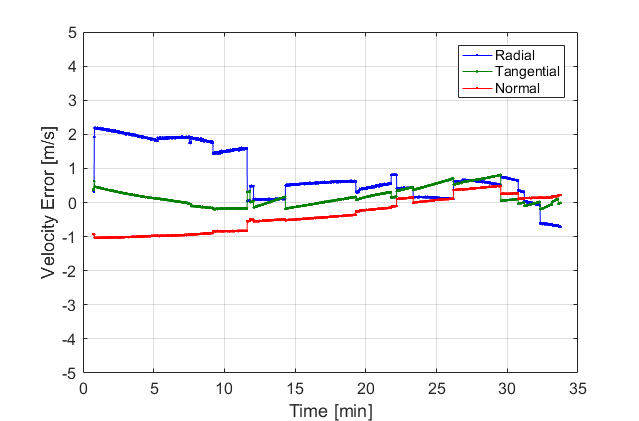 (クリックで拡大)
(クリックで拡大)位置精度はNMEAと同様に数m,速度精度は1m/s程度と,衛星軌道での高速な
受信環境であっても,通常の測位で期待できる精度が得られています.
とりあえず動作に問題はなさそうですが,残念ながらbladeRFではGPS信号しか
シミュレーションできません.
どこかでGPS/GLONASSのシミュレータを借りられないかな.求む,スポンサー!