Ntrip(Networked Transport of RTCM via Internet Protocol)は,
GNSSの観測データや補正データの送受信をインターネット経由で
実現するための仕組みです.静岡大学の
木谷先生が設置された
GNSS基準局の観測データも,このNtripを使って配信されています.
hamamatsu-gnss.org:
静岡大学浜松キャンパス設置のRTK-GNSS用基準局データの常時配信について
NtripはHTTPをベースとしたTCPプロトコルであり,スマートフォンなど
Webにアクセスできる端末からであれば,Ntripが配信するデータにも
アクセスすることができます.
仕組み自体はシンプルなのですが,Ntripを理解する上で混乱のもとに
なっているのが,そのネーミングです.TCPによる接続ですので,
クライアントとサーバの間で通信が行われます.Ntripでは,
Ntrip CasterがTCPサーバとして基準局からのデータを受信したり,
ローバー局にデータを送信したりします.
このとき,TCPサーバであるNtrip Casterにアクセスする基準局も
ローバー局も,どちらもTCPクライアントになります.しかし,
Ntripのネーミングでは,ローバー局のみをNtirp Clientと呼び,
基準局はNtrip Serverと呼びます.つまり,Ntrip Serverは
TCPクライアントなのです.紛らわしい!

このネーミングのせいで,Ntripのクライアントが基準局の受信機に
直接アクセスするようなイメージを持たれてしまいます.そのため,
Ntripの基準局を設置するというと,サーバを立てることと思われる
かもしれません.
しかし,実際には,Ntrip Serverである基準局もTCPクライアントなので,
どこかにTCPサーバであるNtrip Casterがあれば,自分でサーバを立てる
必要はなく,そこに接続するだけで基準局データを自由に配信することが
できます.
一般に,Ntrip Casterによるデータ配信サービスは,データを受信する
Ntrip Clientとしてアクセスすることはできても,自分の基準局データを
送信するためにNtrip Serverとしてアクセスすることはできません.
ありがたいことに,Ntrip Serverとしても自由にアクセスできるオープンな
Ntrip Casterのサービスがいくつかあります.
YouCORS: NTRIP caster as a Service
RTK2GO: Hassle Free RTK Station
Ntrip ServerからNtrip Casterに送られるHTTPデータはストリーム(stream)
と呼ばれ,それぞれにMount Pointという識別用の名前が割り振られます.
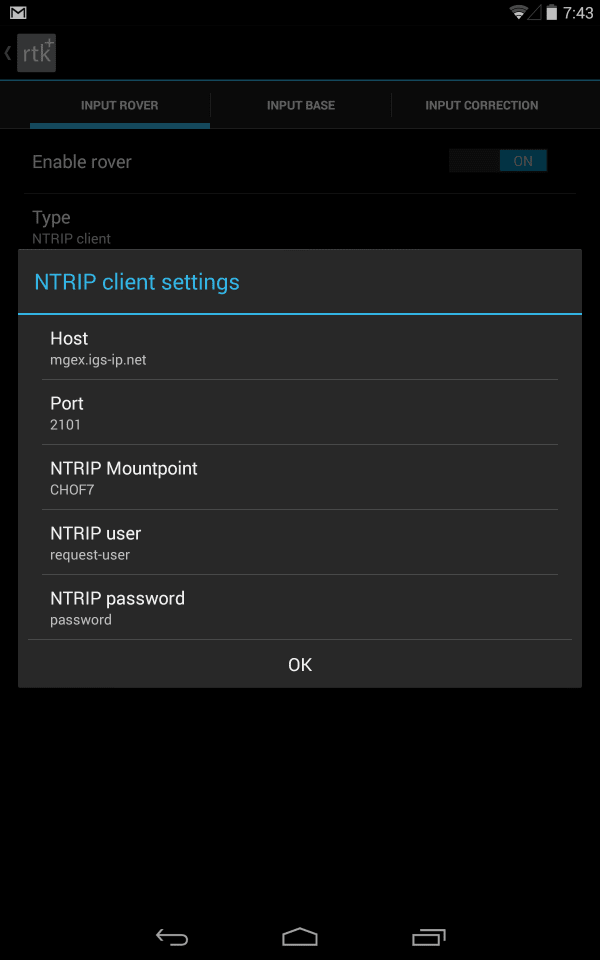
Ntrip CasterにアクセスするNtrip Clientは,このMount Pointを指定して,
自分が受信したいデータを選択します.つまり,Mount Pointは基準局の
名前ではなく,あくまでもストリームの名前です.そのため,ひとつの
基準局からRTCMと
BINEXなどの複数のストリームが配信されることもあります.
ちなみに,RTK2GOはNtrip CasterソフトウェアであるSNIPを販売している
SubCarrier Systemsが運用しているサービスです.SNIPは,Windowsで
動作するNtrip Casterで,無償版もあります.
SNIP:
FEATURES AND PRICING LIST
無償版ではNtrip Serverを3個まで接続することができます.Ntrip Client
からのアクセス数は無制限です.SNIPで自前のNtrip Casterを立ち上げても
良いかもしれません.
このようなオープンなNtrip Casterが増えて,大学や個人の設置する基準局の
データにいつでもアクセスできるGNSSデータ配信ネットワークが広がるといいな.
【追記】BKG's Standard NtripCaster Version 0.1.5
github.com: roice /
ntripcaster