HackRF Oneのhost softwareをWindowsでbuildしようとしたのですが,
いろいろと嵌ったので,メモを残しておきます.
公式の手順はこちら.あっさりしすぎ.
HackRF:
How to build host software on Windows
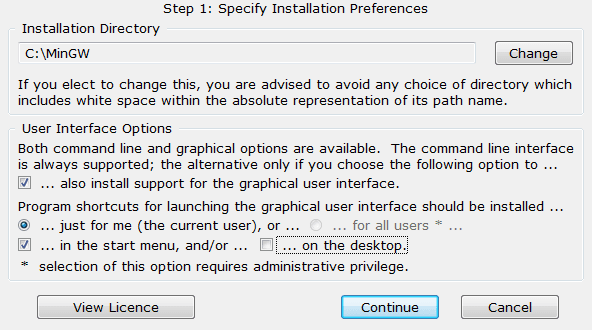
まずは,MinGWをインストールします.
MinGW:
mingw-get-setup.exe (2013-10-04)
インストール先はC:\MinGWを選びます.

(クリックで拡大)
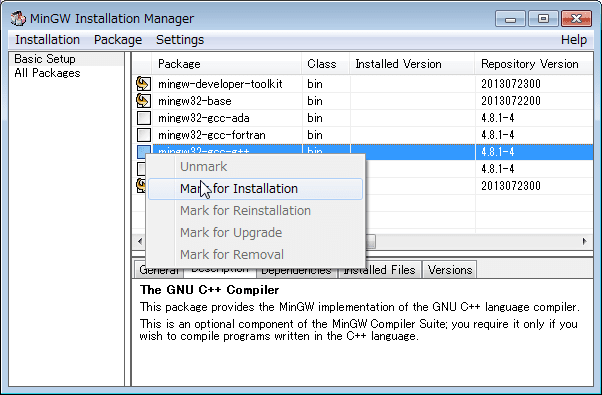
Basic Setupからは,以下のパッケージを選択しました.
mingw-developer-toolkit
mingw32-base
mingw32-gcc-g++
msys-base

(クリックで拡大)
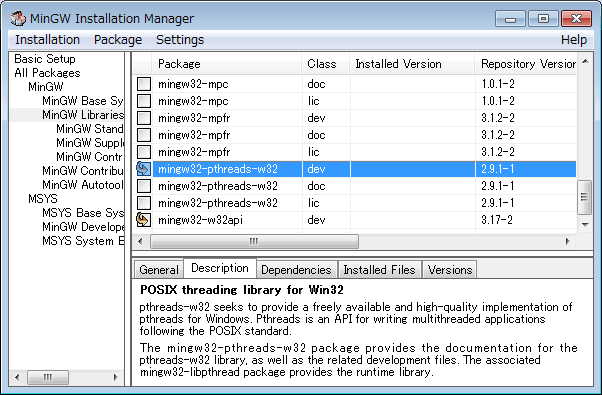
pthreadsも忘れずにインストールします.

(クリックで拡大)
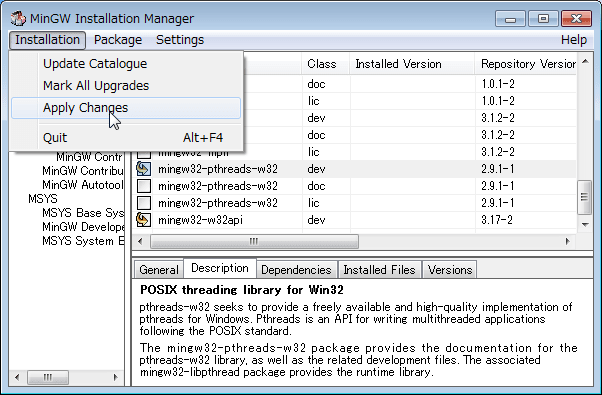
パッケージの選択が完了したら,InstallationメニューからApply Changesをクリックし,
インストールを開始します.

(クリックで拡大)
さて,ここでMinGWのインストールの確認のためにgccを実行してみると,
ドライブにディスクがありませんと警告がでます.

(クリックで拡大)
どうやら,MinGWのパッケージに含まれるgccは,まずはEドライブを探しに行くようです.
実行環境によっては,Eドライブが存在しないために,この警告が出てしまいます.
MinGWのフォーラムにバグとして報告されているのですが,去年の12月から動きがありません.
MinGW:
No Disk error when running g++ from cmd/tcc while a card reader with empty slots is connected
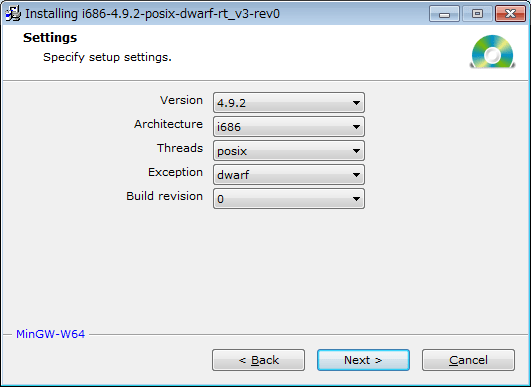
Windows版のgccの開発は,
MinGW-w64にシフトしたようなので,こちらをインストールします.
MinGW-w64:
mingw-w64-install.exe (2014-10-30)
設定はとりあえずデフォルトで.インストール先はC:\mingw-w64にしています.

(クリックで拡大)
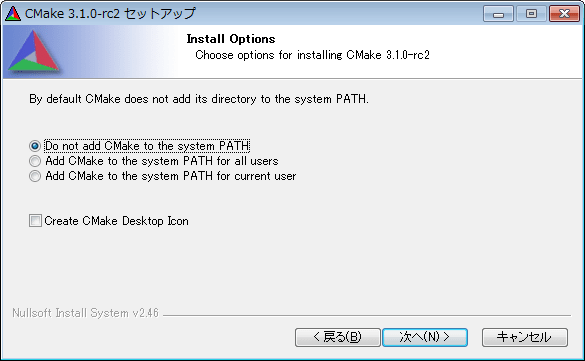
次に,CMakeをインストールします.
CMake:
Win32 Installer (cmake-3.1.0-rc2-win32-x86.exe)
インストール先のフォルダはC:\CMakeを選びます.PATHは後から追加します.

(クリックで拡大)
これで開発ツールは整いました.環境変数のPATHに以下の順番でフォルダを追加します.
C:\CMake\bin;C:\mingw-w64;C:\MinGW\bin;C:\MinGW\msys\1.0\bin
つづいて,libusbxをダウンロードして,C:\libusbx-1.0.18-winへ展開します.
libusbx:
libusbx-1.0.18-win.7z (2014-01-25)
最後に,HackRFのパッケージをダウンロードして,C:\hackrfへ展開します.
HackRF:
hackrf-2014.08.1.zip (2014-08-28)
これでbuildに必要なパッケージがすべて揃いました.
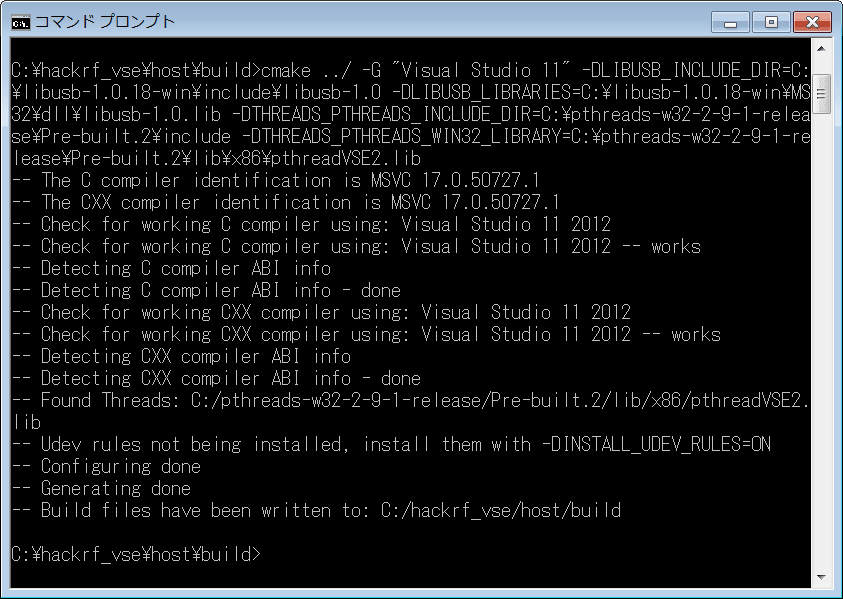
Windowsのアクセサリからコマンドプロンプトを起動し,以下の手順でhost softwareをbuildします.
>cd C:\hackrf\host
>mkdir build
>cd build
>cmake ../ -G "MSYS Makefiles" -DLIBUSB_INCLUDE_DIR=C:\libusbx-1.0.18-win\include\libusbx-1.0 -DLIBUSB_LIBRARIES=C:\libusbx-1.0.10-win\MinGW32\dll\libusb-1.0.dll
>make
こでれ,HackRFのツールとライブラリがbuildされます.
ツールの実行に必要な以下のファイルを一式,C:\hackrf\binにコピーします.
C:\MinGW\bin\pthreadGC2.dll
C:\libusbx-1.0.18-win\MinGW32\dll\libusb-1.0.dll
C:\hackrf\host\build\libhackrf\src\libhackrf.dll
C:\hackrf\host\build\hackrf-tools\src\hackrf_info.exe
C:\hackrf\host\build\hackrf-tools\src\hackrf_transfere.exe
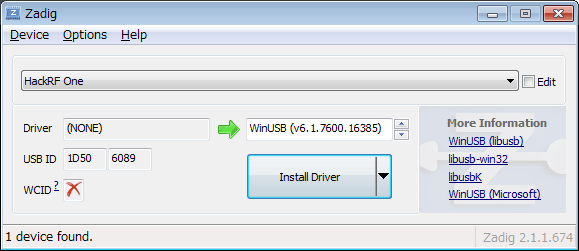
HackRFのUSBドライバのインストールには,zadigを使用します.
zadig.akeo.ie:
zadig_v2.1.1.exe (2014-11-30)
HackRFをUSBポートに接続し,zadigを実行します.
デバイスにHackRF Oneを選び,WinUSBをインストールします.

(クリックで拡大)
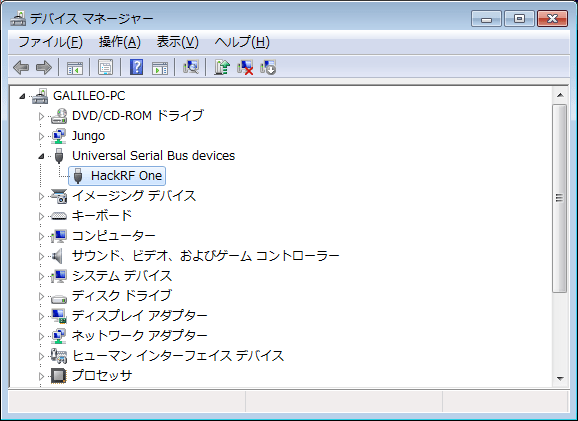
デバイスマネージャーを開くと,Universal Serial Bus devicesとして
HackRF Oneが認識されています.

(クリックで拡大)
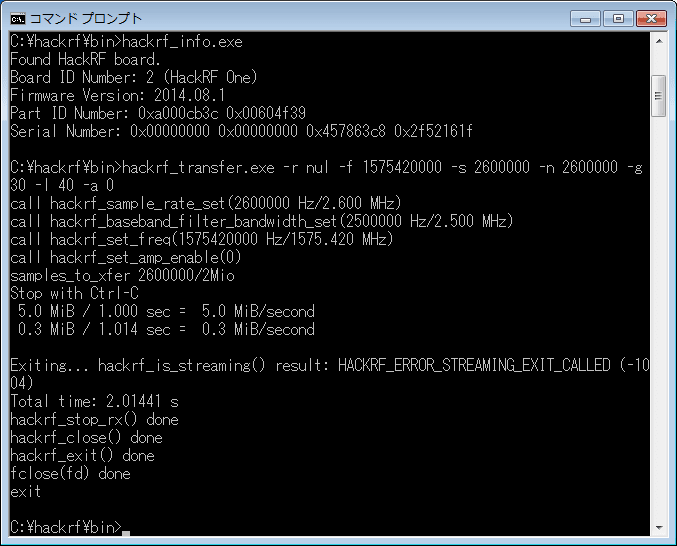
コマンドプロンプトからhackrf_infoを実行すると,無事にHackRF Oneが見つかりました.

(クリックで拡大)
ubuntuと同様に,まずはファイル書き込みなしで受信データの転送を確認します.
Linuxの/dev/nullは,Windowsではnulになります.(nullではないので注意.)
>hackrf_transfer.exe -r nul -f 1575420000 -s 2600000 -n 260000000 -g 30 -l 40 -a 0
データ転送は問題ないようですが,実行停止の際にエラーが発生します.
これは,HackRFのページでも
Note for Windows buildとして言及されていますが,
コマンドプロンプトを使っても解決しない?
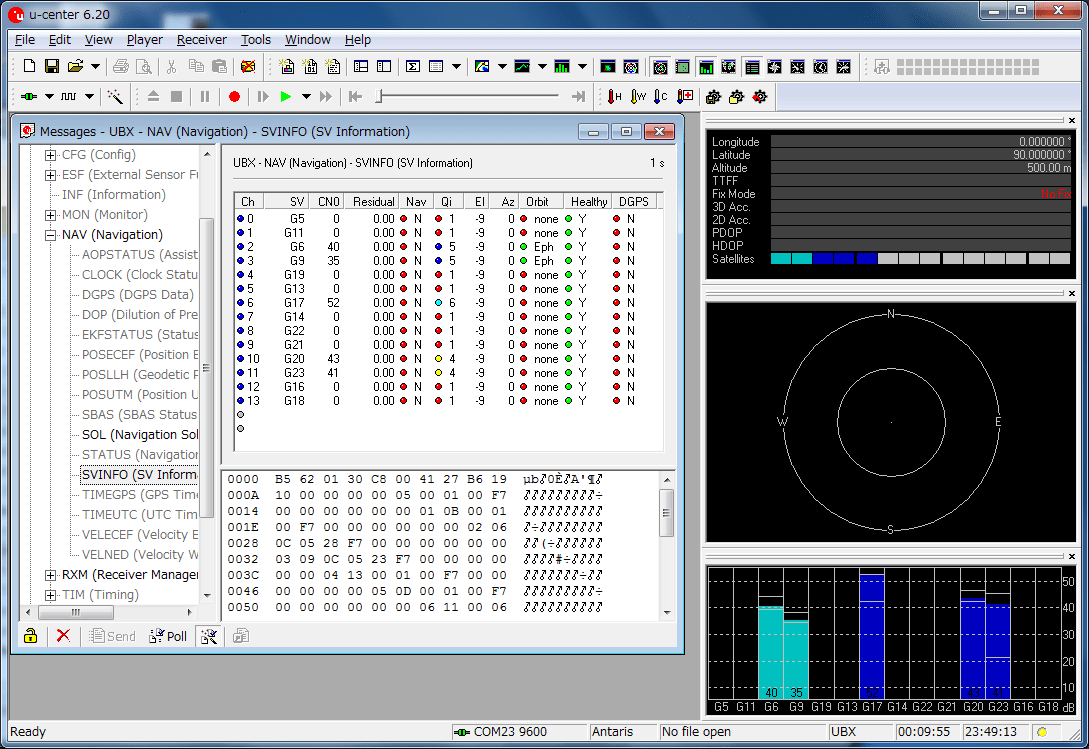
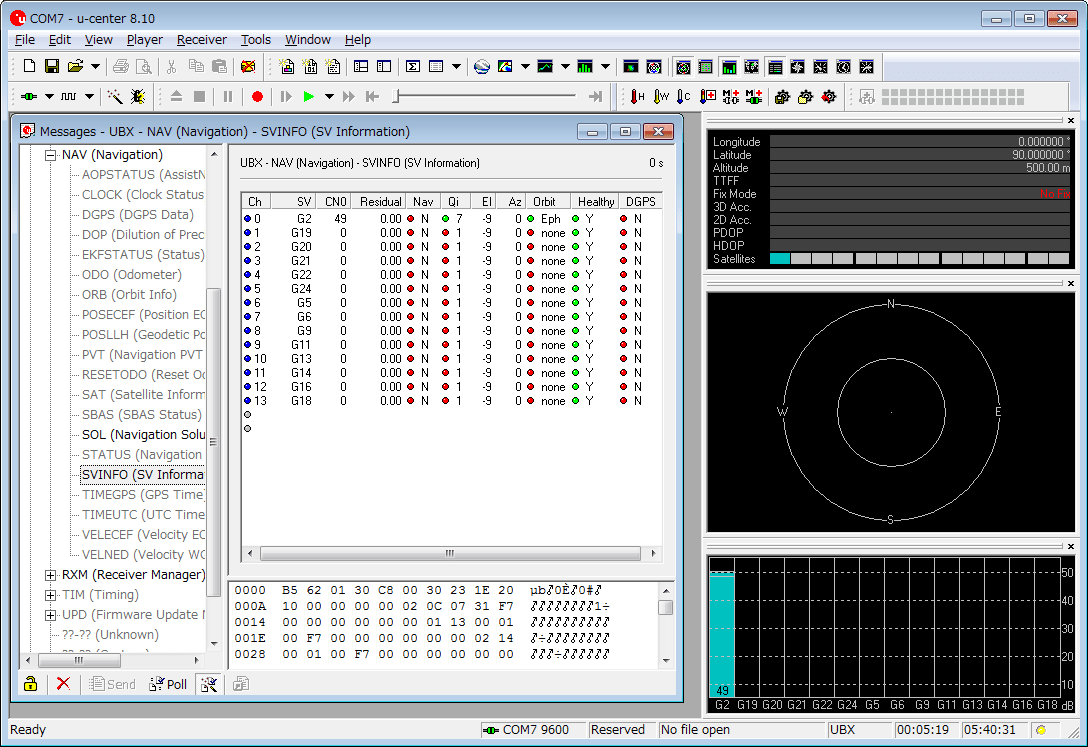
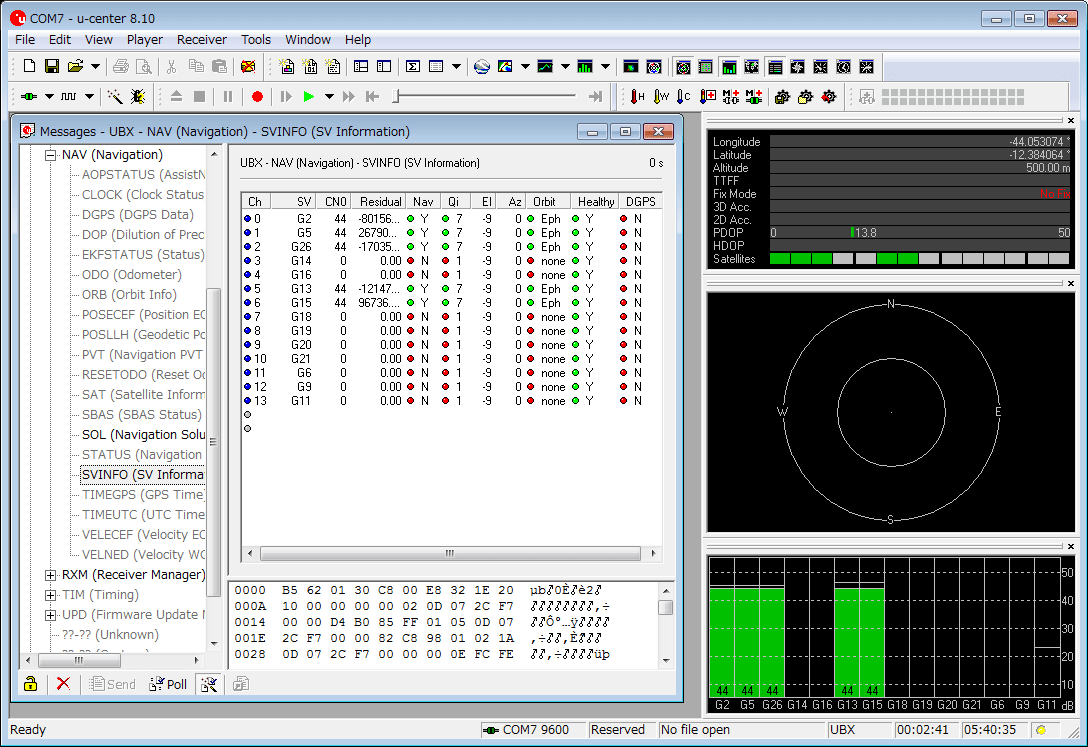
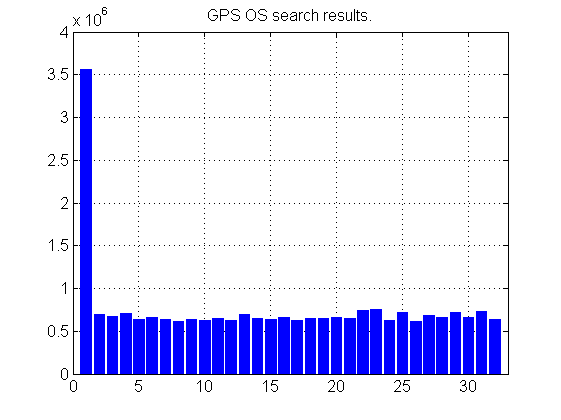
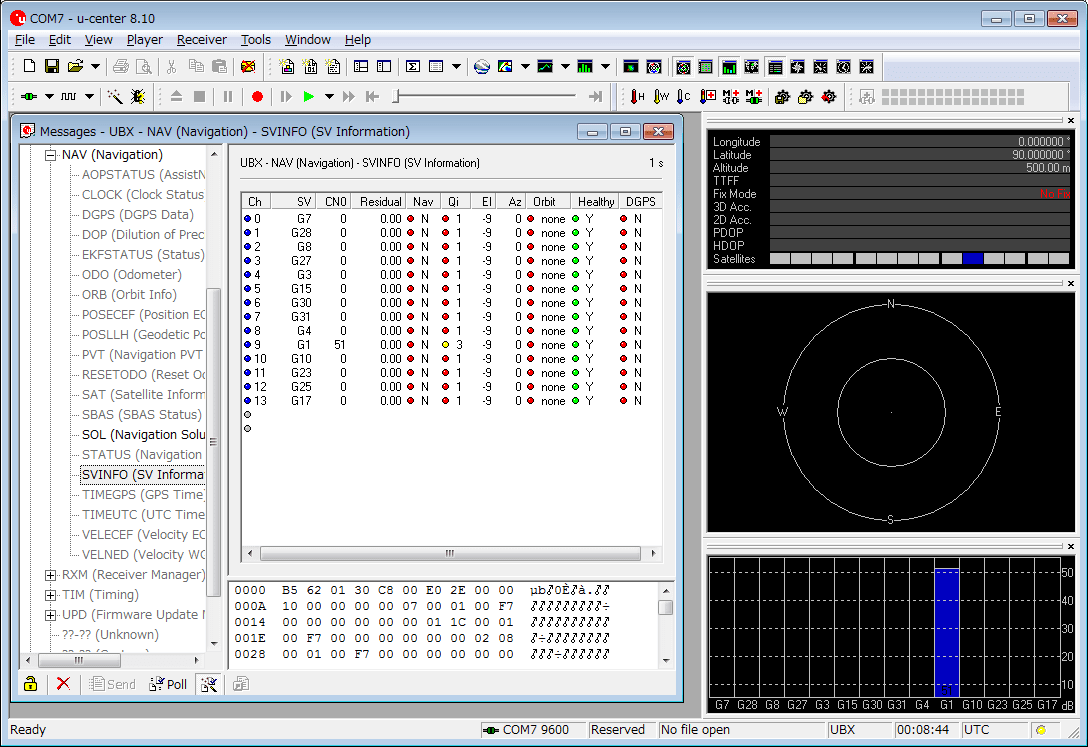
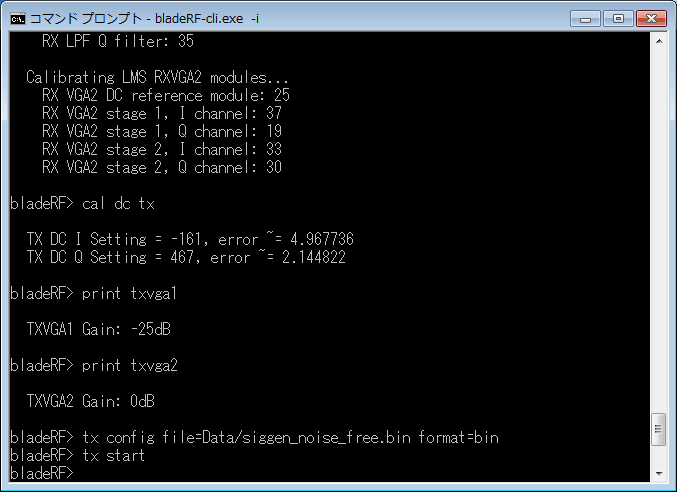
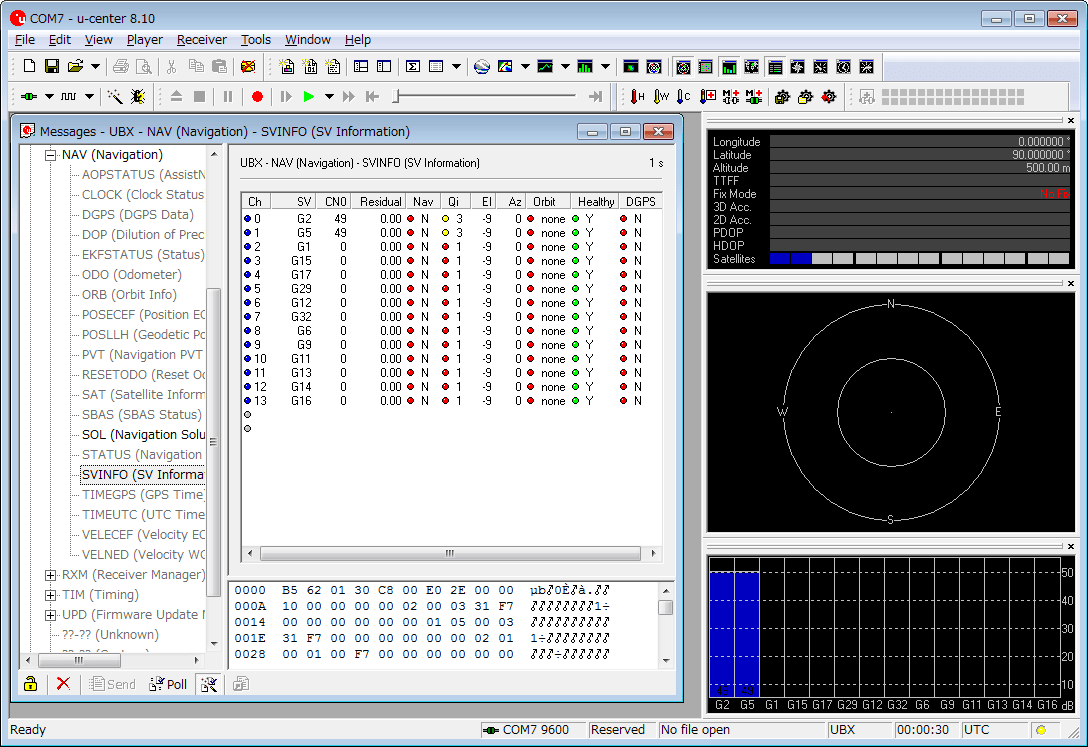
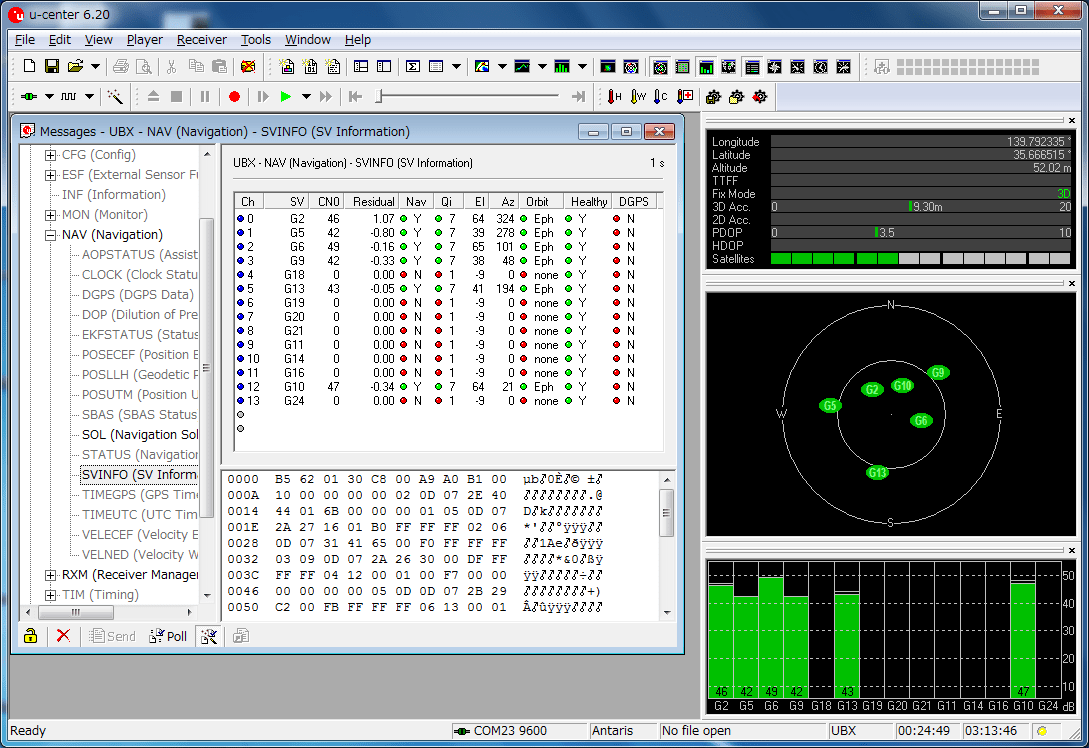
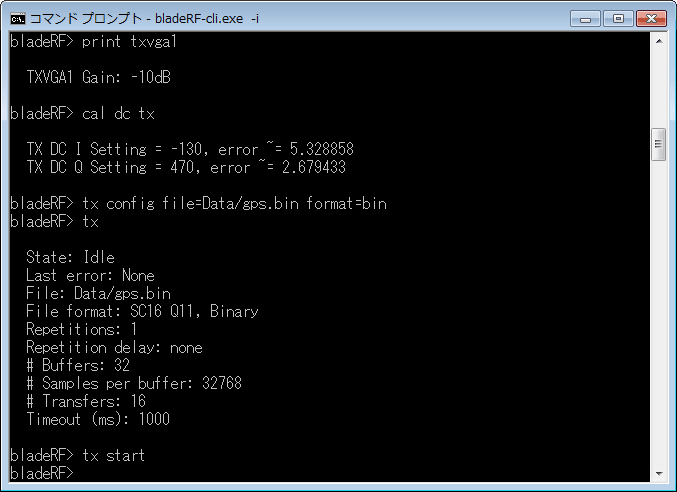
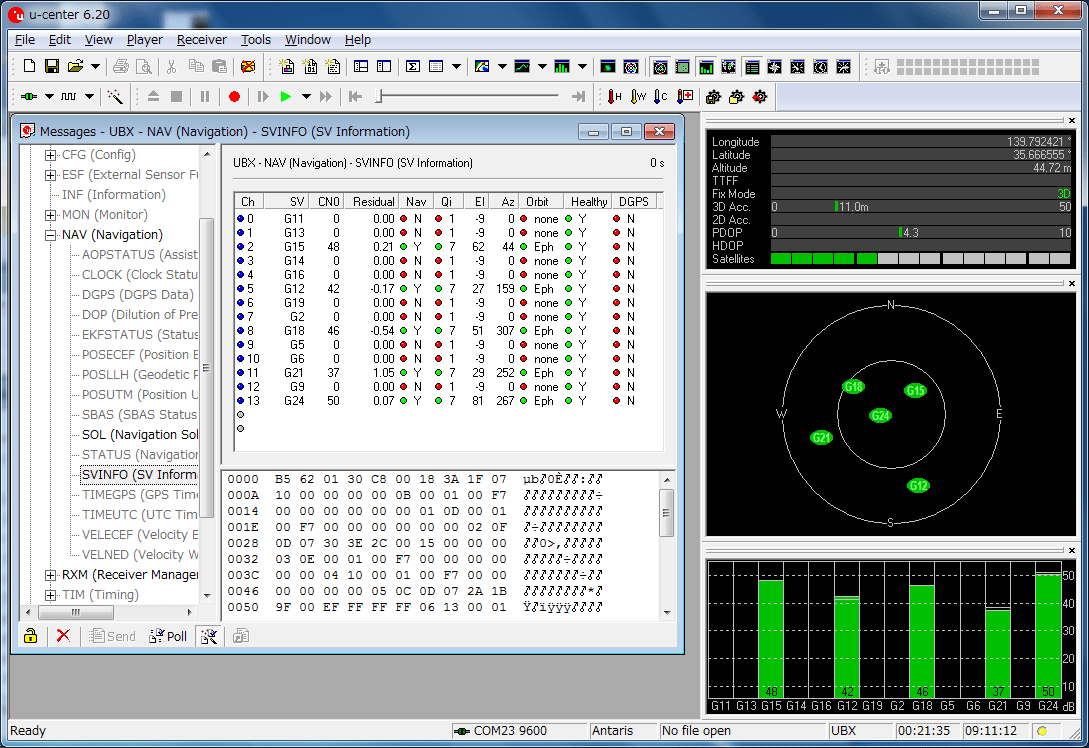
とりあえず,WindowsからでもHackRF Oneが動きそうなので,
taro君のGNSS-SDRLIBに繋いでみよう.
taroz:
GNSS-SDRLIB









 (クリックで拡大)
(クリックで拡大) (クリックで拡大)
(クリックで拡大)