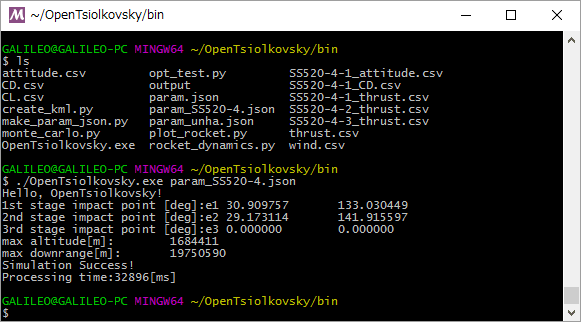
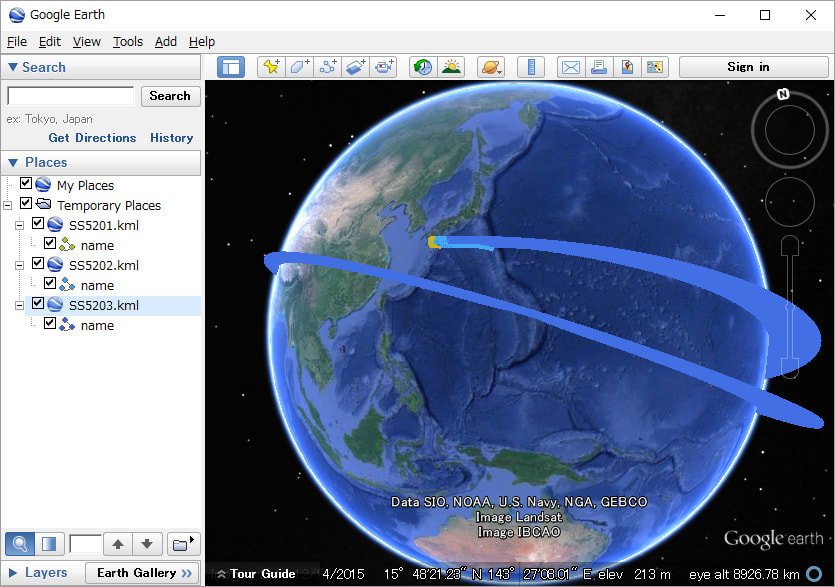
OpenTsiolkovskyでSS-520観測ロケット4号機の予測軌道が生成できたので,
これからGPS信号シミュレータ用のモーションファイルをつくります.
OpenTsiolkovskyの出力は,各段の軌道に分かれていますが,
全行程をシミュレーションできるよう,1段目から3段目までの軌道を
分離時間ごとに繋げます.
さらに,射点でGPS信号が補足できるよう,発射前の1分間は
初期位置に留まっていることにします.
この予測軌道をss520-4.csvというuser motion fileとして,
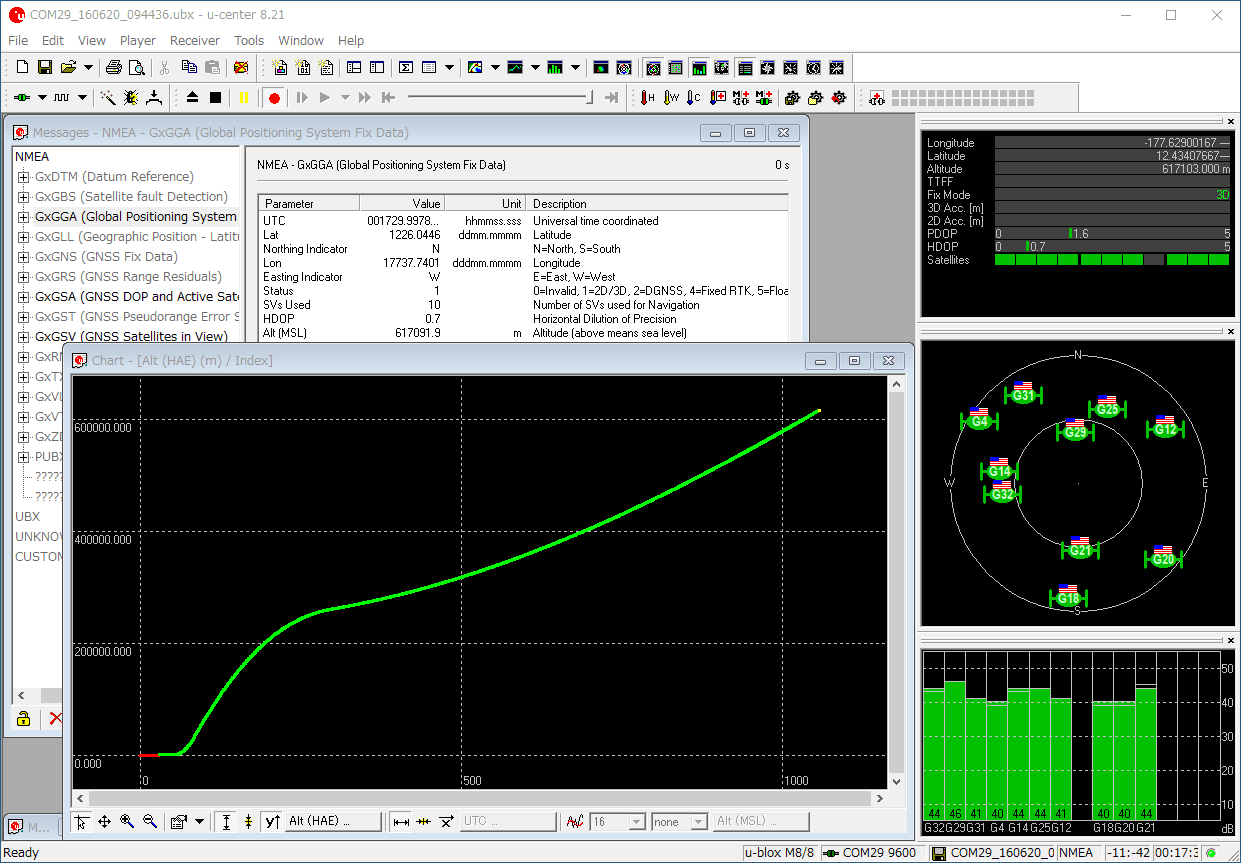
リアルタイム版のGPS信号シミュレータであるbladeGPSに入力します.
github.com / osqzss / bladeGPS
gps-sdr-simは,SDRデバイスに入力するI/Q信号のサンプリングデータが
巨大になり,長時間のシミュレーションには向いていませんでした.
しかし,bladeGPSでは,user motion fileの位置情報から,リアルタイムで
I/Q信号を計算するため,データ量を気にすることなく,長時間の連続した
シミュレーションが可能です.
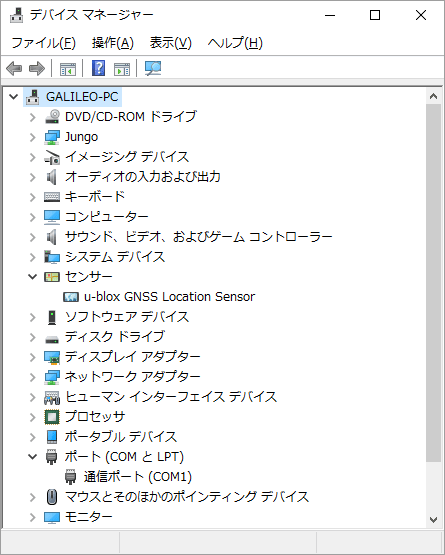
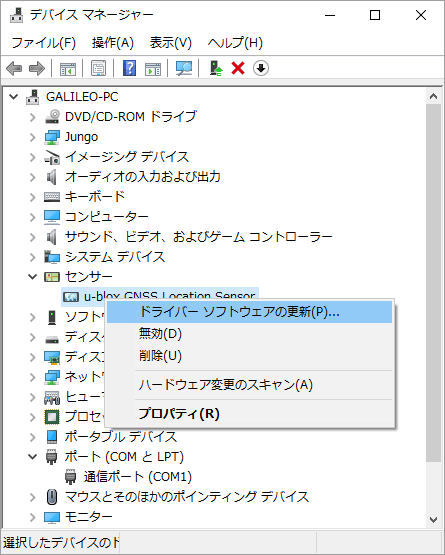
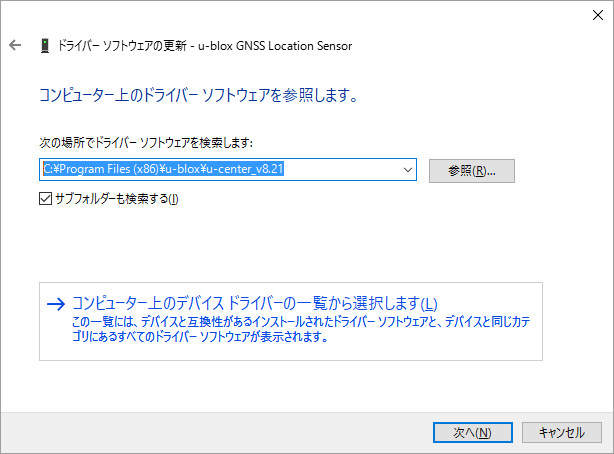
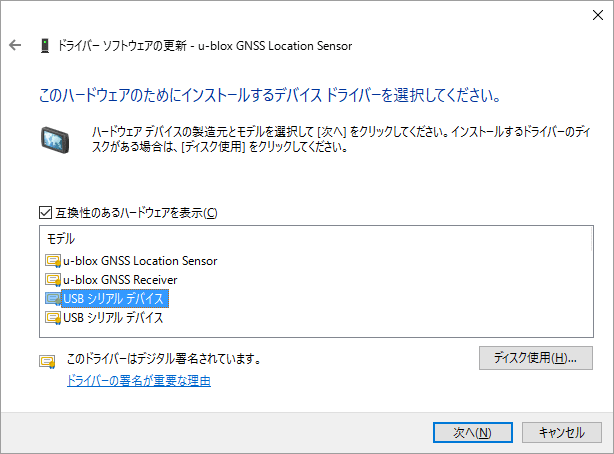
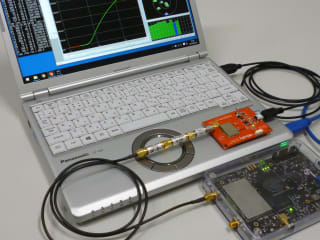
シミュレータから出力されるGPS信号は,firefly GNSS受信機で受信します.
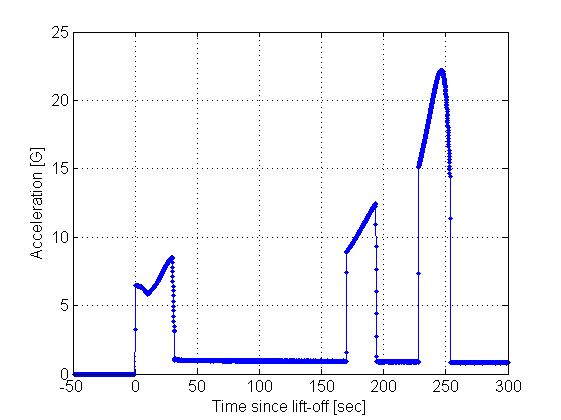
予測軌道の加速度をみてみると,3段目が20Gを超える高ダイナミクス.
 (クリックで拡大)
(クリックで拡大)
しかし,fireflyは,ロケット搭載も考慮して,最大25Gの加速度でも
信号を追尾できるように設計しています.シミュレーションの結果も,
打ち上げから一度も信号を失うことなく,測位できています.
 (クリックで拡大)
(クリックで拡大)
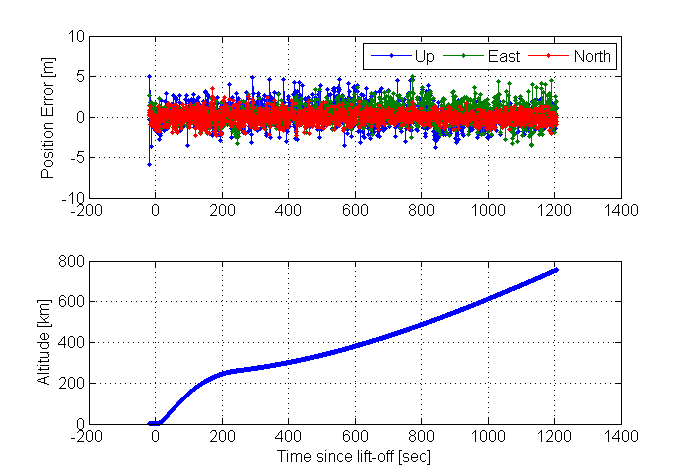
測位誤差をみてみると,大きな加速度の変化に関係なく,測位精度は
5m以下を維持しています.
 (クリックで拡大)
(クリックで拡大)
bladeGPSもfireflyも,控えめに言って最高だ!
これからGPS信号シミュレータ用のモーションファイルをつくります.
OpenTsiolkovskyの出力は,各段の軌道に分かれていますが,
全行程をシミュレーションできるよう,1段目から3段目までの軌道を
分離時間ごとに繋げます.
さらに,射点でGPS信号が補足できるよう,発射前の1分間は
初期位置に留まっていることにします.
この予測軌道をss520-4.csvというuser motion fileとして,
リアルタイム版のGPS信号シミュレータであるbladeGPSに入力します.
github.com / osqzss / bladeGPS
gps-sdr-simは,SDRデバイスに入力するI/Q信号のサンプリングデータが
巨大になり,長時間のシミュレーションには向いていませんでした.
しかし,bladeGPSでは,user motion fileの位置情報から,リアルタイムで
I/Q信号を計算するため,データ量を気にすることなく,長時間の連続した
シミュレーションが可能です.
シミュレータから出力されるGPS信号は,firefly GNSS受信機で受信します.
予測軌道の加速度をみてみると,3段目が20Gを超える高ダイナミクス.
 (クリックで拡大)
(クリックで拡大)しかし,fireflyは,ロケット搭載も考慮して,最大25Gの加速度でも
信号を追尾できるように設計しています.シミュレーションの結果も,
打ち上げから一度も信号を失うことなく,測位できています.
 (クリックで拡大)
(クリックで拡大)測位誤差をみてみると,大きな加速度の変化に関係なく,測位精度は
5m以下を維持しています.
 (クリックで拡大)
(クリックで拡大)bladeGPSもfireflyも,控えめに言って最高だ!