実験の待ち時間に,LabSat 3をGPS信号シミュレータに接続して
ロケットシナリオの信号を記録してきました.

ロケットの軌道には,学生時代にお世話になったMAXUSのデータを
使用しました.微小重力実験のための大型観測ロケットで,
高度は700km以上に達します.

フライトの時間はトータルで17分と長めで,4GBに収まるかどうか
不安だったのですが,実際にデータを取得してみたら,2GBのファイルに
分割されていました.どうやら,長時間の信号でも,自動的に分割され,
問題なく記録できそうです.
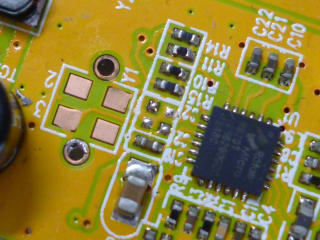
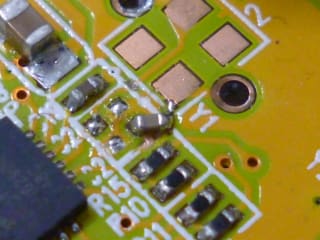
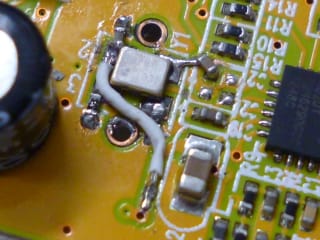
記録が完了したら,ロケット搭載用に開発したGPS受信機に接続して,
信号を再生します.

GPS受信機のハードウェアは市販品ですが,中身の信号処理
ソフトウェアは総入れ替えのオリジナルです.高度・速度制限が
無いのはもちろん,ロケットの高加速度にも対応しています.
出力フォーマットは,u-blox社の受信機とコンパチにしいています.
そのため,モニタリングにu-centerをそのまま使うことができます.
 (クリックで拡大)
(クリックで拡大)
残念ながら,u-centerから開くGoogle Earthのプロットは,高度が
地上に固定されてしまっています.結局,一旦保存した測位結果を
kmlファイルに変換して表示することにしました.
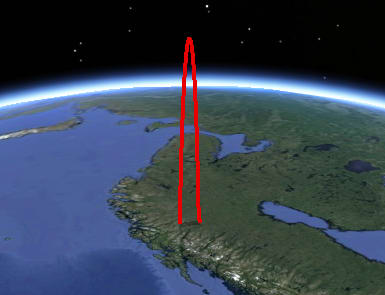
全軌道で欠損なく測位ができています.LabSat 3,GPS受信機共に,
問題なく動作しているようです.
何らかの形でGPS信号を発生させ,それを記録しなければならない
手間はありますが,一度記録すればコンパクトなデバイスで何度も
再生でき,とても便利です.
また,記録されたGPS信号は単なるデジタルのデータですので,
原理的には実信号を記録しなくても,数値的に生成することが可能です.
bladeRFでは,この数値的にGPS信号を模擬する機能も開発して,
フルスペックのシミュレータを目指します.
【追記】MAXUSのペーパーモデルがある!これは作るしかない.
【追記2】FPGA版GPS受信機での動作も確認.

ロケットシナリオの信号を記録してきました.
ロケットの軌道には,学生時代にお世話になったMAXUSのデータを
使用しました.微小重力実験のための大型観測ロケットで,
高度は700km以上に達します.
フライトの時間はトータルで17分と長めで,4GBに収まるかどうか
不安だったのですが,実際にデータを取得してみたら,2GBのファイルに
分割されていました.どうやら,長時間の信号でも,自動的に分割され,
問題なく記録できそうです.
記録が完了したら,ロケット搭載用に開発したGPS受信機に接続して,
信号を再生します.
GPS受信機のハードウェアは市販品ですが,中身の信号処理
ソフトウェアは総入れ替えのオリジナルです.高度・速度制限が
無いのはもちろん,ロケットの高加速度にも対応しています.
出力フォーマットは,u-blox社の受信機とコンパチにしいています.
そのため,モニタリングにu-centerをそのまま使うことができます.
 (クリックで拡大)
(クリックで拡大)残念ながら,u-centerから開くGoogle Earthのプロットは,高度が
地上に固定されてしまっています.結局,一旦保存した測位結果を
kmlファイルに変換して表示することにしました.
全軌道で欠損なく測位ができています.LabSat 3,GPS受信機共に,
問題なく動作しているようです.
何らかの形でGPS信号を発生させ,それを記録しなければならない
手間はありますが,一度記録すればコンパクトなデバイスで何度も
再生でき,とても便利です.
また,記録されたGPS信号は単なるデジタルのデータですので,
原理的には実信号を記録しなくても,数値的に生成することが可能です.
bladeRFでは,この数値的にGPS信号を模擬する機能も開発して,
フルスペックのシミュレータを目指します.
【追記】MAXUSのペーパーモデルがある!これは作るしかない.
【追記2】FPGA版GPS受信機での動作も確認.