








@ina111さんが素敵なロケットシミュレータを公開してくださったので,
GPS信号シミュレータ用のモーションファイルを作ってみました.
GitHub: ina111/MatRockSim
愛用しているSpirent社のGPS信号シミュレータでは,車や航空機,
人工衛星にはシナリオのテンプレートが準備されているのですが,
なぜかロケットはありません.
Spirent: GSS8000 GPS/GNSS Constellation Simulator
飛翔体のシミュレーションをするとなると,ユーザが自前で
モーションファイルと呼ばれる位置と姿勢の時系列データを準備して,
それをSimREMOTEというオプションでシミュレータに読み込ませる
必要があります.
Spirent: SimREMOTE User Manual (PDF, 6.6MB)
位置については,MatRockSimがECEF座標系で出力しているので,
そのままモーションファイルに利用できます.
姿勢については,MatRockSimがUp-East-Northのローカル座標に対する
quaternionsを出力するのに対して,GPS信号シミュレータでは,
North-East-Down座標でのheading,elevation,bankで記述します.
ある座標系で定義されたquaternionsを別の座標系から見たものに
どうやって変換するのか,いまひとつ理解できなかったので,
座標変換はあきらめて,ロケットの機体座標系を無理やり一致させました.
そのため,GPS信号シミュレータでは飛行機の背中からにょっきりと
ロケットが突き出したようなビジュアルになります.
ただし,オイラー角がsingularになってしまうケースがあるなど,
姿勢については,まだGPS信号シミュレータ側で工夫が必要です.
ロケットの機体や性能に関するパラメータはなかなか一般に公開されませんが,
宇宙研のM-3ロケットシリーズの機体データがwebに掲載されています.
ISAS: 衛星打ち上げロケットM3-S
この公開データをもとに,ina111さんがMatRockSim用のパラメータファイルを
準備してくださったので,早速,GPS信号シミュレータ用のシナリオを作成して
動作試験をしてみました.
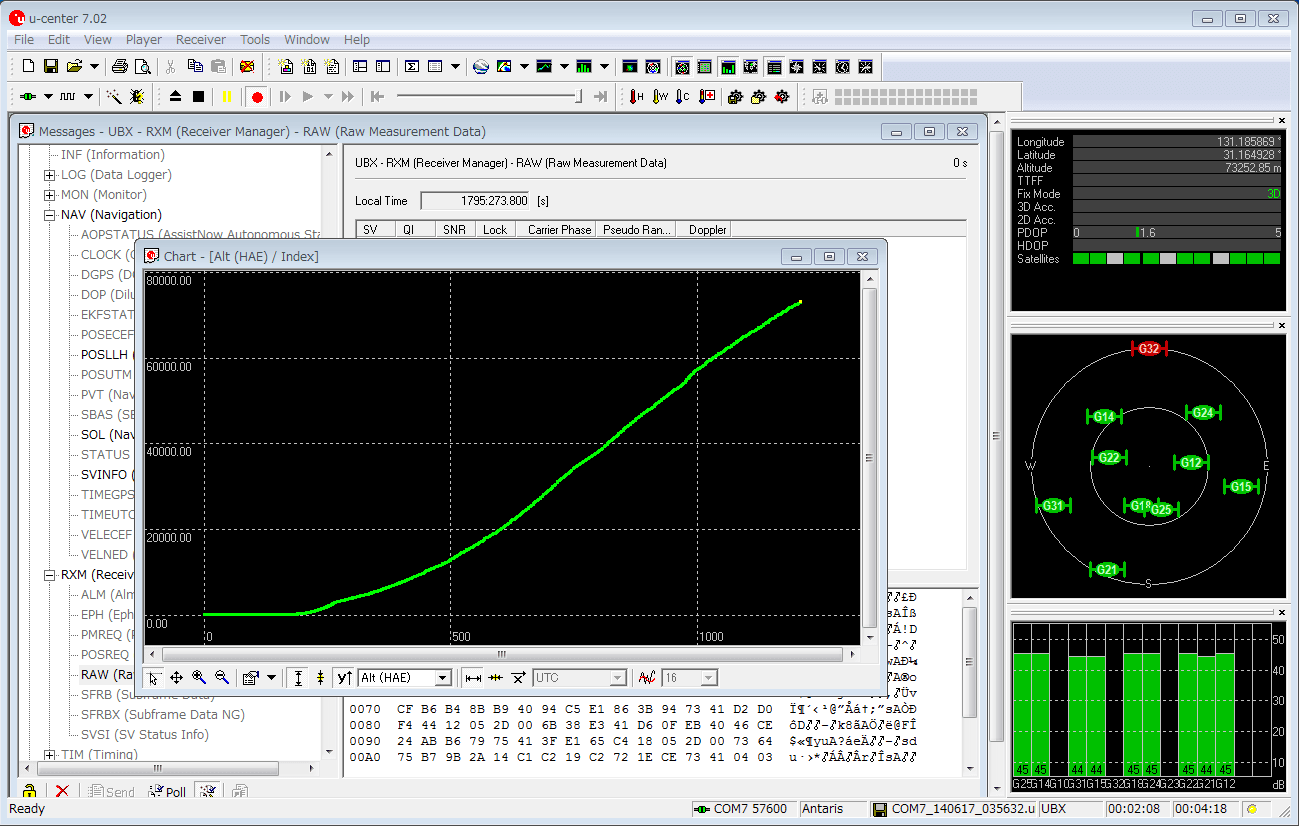
受信機は,いつものようにNovAtel SuperStar II+自作ファームウェアです.

ina111さん向けに開発したファームウェアでは,ublox社のGPS受信機と互換性のある
出力フォーマットを実装しています.そのため,u-centerで観測データのモニタリングや
ログができます.
 (クリックで拡大)
(クリックで拡大)
MatRockSimから生成したロケットのシナリオはGPS信号シミュレータで問題なく実行され,
受信機の方もロケットのダイナミクスや速度・高度に関係なく測位できていました.
 (クリックで拡大)
(クリックで拡大)
 (クリックで拡大)
(クリックで拡大)
これでロケット用GPS受信機の開発が捗る!
GPS信号シミュレータ用のモーションファイルを作ってみました.
GitHub: ina111/MatRockSim
愛用しているSpirent社のGPS信号シミュレータでは,車や航空機,
人工衛星にはシナリオのテンプレートが準備されているのですが,
なぜかロケットはありません.
Spirent: GSS8000 GPS/GNSS Constellation Simulator
飛翔体のシミュレーションをするとなると,ユーザが自前で
モーションファイルと呼ばれる位置と姿勢の時系列データを準備して,
それをSimREMOTEというオプションでシミュレータに読み込ませる
必要があります.
Spirent: SimREMOTE User Manual (PDF, 6.6MB)
位置については,MatRockSimがECEF座標系で出力しているので,
そのままモーションファイルに利用できます.
姿勢については,MatRockSimがUp-East-Northのローカル座標に対する
quaternionsを出力するのに対して,GPS信号シミュレータでは,
North-East-Down座標でのheading,elevation,bankで記述します.
ある座標系で定義されたquaternionsを別の座標系から見たものに
どうやって変換するのか,いまひとつ理解できなかったので,
座標変換はあきらめて,ロケットの機体座標系を無理やり一致させました.
そのため,GPS信号シミュレータでは飛行機の背中からにょっきりと
ロケットが突き出したようなビジュアルになります.
ただし,オイラー角がsingularになってしまうケースがあるなど,
姿勢については,まだGPS信号シミュレータ側で工夫が必要です.
ロケットの機体や性能に関するパラメータはなかなか一般に公開されませんが,
宇宙研のM-3ロケットシリーズの機体データがwebに掲載されています.
ISAS: 衛星打ち上げロケットM3-S
この公開データをもとに,ina111さんがMatRockSim用のパラメータファイルを
準備してくださったので,早速,GPS信号シミュレータ用のシナリオを作成して
動作試験をしてみました.
受信機は,いつものようにNovAtel SuperStar II+自作ファームウェアです.
ina111さん向けに開発したファームウェアでは,ublox社のGPS受信機と互換性のある
出力フォーマットを実装しています.そのため,u-centerで観測データのモニタリングや
ログができます.
 (クリックで拡大)
(クリックで拡大)MatRockSimから生成したロケットのシナリオはGPS信号シミュレータで問題なく実行され,
受信機の方もロケットのダイナミクスや速度・高度に関係なく測位できていました.
 (クリックで拡大)
(クリックで拡大)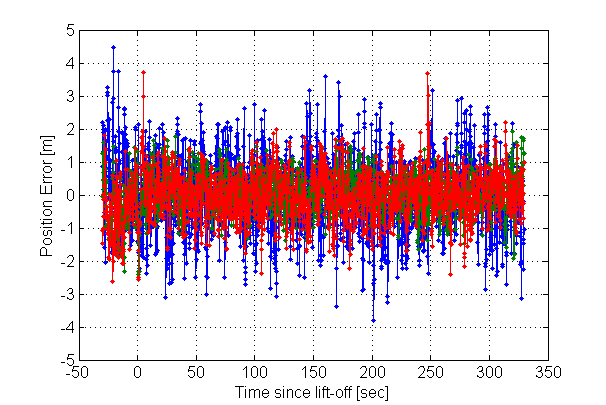 (クリックで拡大)
(クリックで拡大)これでロケット用GPS受信機の開発が捗る!












※コメント投稿者のブログIDはブログ作成者のみに通知されます