








RTKNAVIの使い方で設置した基地局の精密なアンテナ位置を求めるために,
まずは測位の基準点となる電子基準点のデータをダウンロードしました.
基地局の観測データは,u-blox社が提供するGPS評価用ソフトウェアの
u-centerを使って取得します.
ublox: u-center GNSS evaluation software for Windows
u-centerと受信機の接続については,こちらをご参照ください.

ここでは,取得されたデータのファイル名をbase_140412_013700.ubxとします.
 (クリックで拡大)
(クリックで拡大)
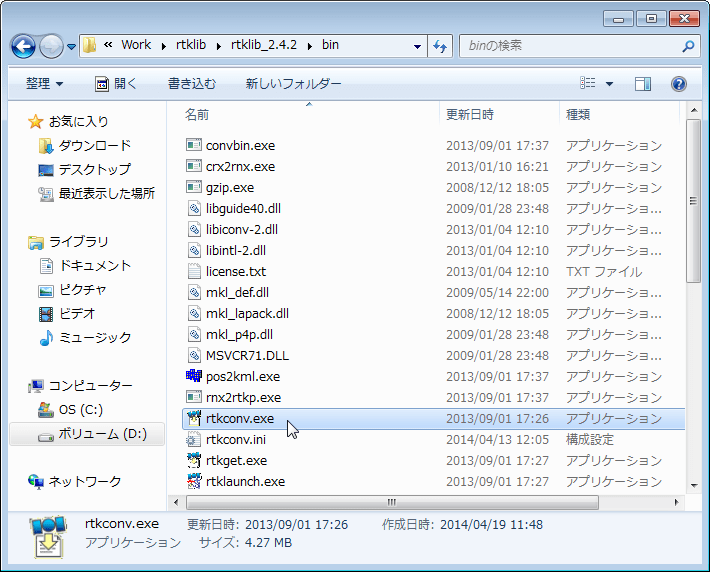
まず,RTKCONVを使用して,このUBXフォーマットのファイルから,標準的な
RINEXフォーマットの観測ファイルと衛星軌道情報ファイルを生成します.
 (クリックで拡大)
(クリックで拡大)
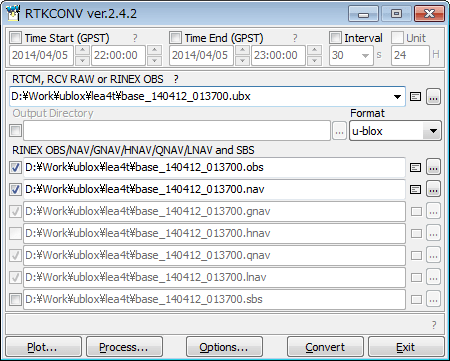
RTKCONVを起動し,RTCM, RCV RAW or RINEX OBSのボックスで,UBXファイルを
選択します.Formatには,プルダウンメニューからu-bloxを選びます.
出力ファイルには,RINEX OBS/NAV/GNAV/HNAV/QNAV/LNAV and SBSのリストから,
OBSとNAVをチェックします.
 (クリックで拡大)
(クリックで拡大)
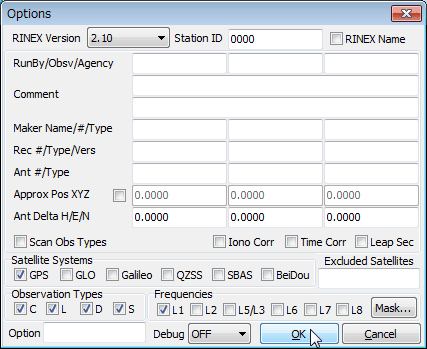
次に,Optionsボタンをクリックして,生成するRINEXファイルの詳細を設定します.
ここでは,RINEX Versionに,電子基準点からダウンロードしたRINEXと同じ2.10を選びました.
LEA-4Tの場合,Satellite SystemsはGPSのみ,FrequenciesはL1のみとなります.
Observation TypesにはC(疑似距離),L(搬送波位相),D(ドップラー),S(信号強度)を
選んでいます.
 (クリックで拡大)
(クリックで拡大)
設定後にConvertをクリックすると,観測ファイルのOBSと衛星軌道情報ファイルのNAVが
生成されます.
 (クリックで拡大)
(クリックで拡大)
これで,基準局のアンテナ位置を求めるために必要なファイルがすべて揃いました.
精密測位を実施するために,RTKPOSTを起動します.
 (クリックで拡大)
(クリックで拡大)
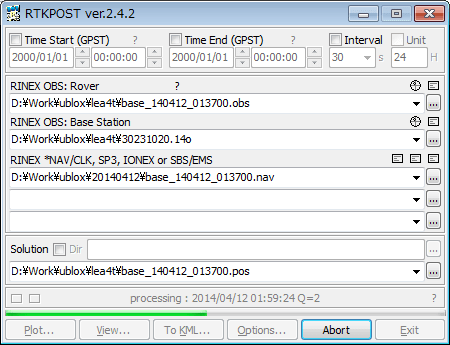
RINEX OBS: Roverには,精密位置を求めたい基地局の観測ファイルを選びます.
RINEX OBS: Base Stationには,電子基準点の観測ファイルを選びます.
RINEX NAV/CLKには,衛星軌道情報ファイルを選びます.
 (クリックで拡大)
(クリックで拡大)
次に,Optionsボタンをクリックして,測位演算の詳細を設定します.
Setting 1のタブでは,Positioning ModeにKinematicを選びます.
FrequenciesはL1のみ,Elevation Maskは15度としました.
 (クリックで拡大)
(クリックで拡大)
Setting 2のタブでは,Integer Ambiguity ResとしてContinuousを選びました.
 (クリックで拡大)
(クリックで拡大)
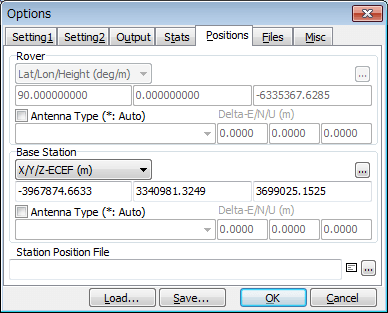
Positionsのタブでは,Base Stationである電子基準点の座標を指定します.
ここでは,電子基準点データ提供サービスからダウンロードした千葉市川の
日々の座標値から,最新の値を入力しました.
 (クリックで拡大)
(クリックで拡大)
設定後にExecuteボタンをクリックすると,測位演算が開始されます.
 (クリックで拡大)
(クリックで拡大)
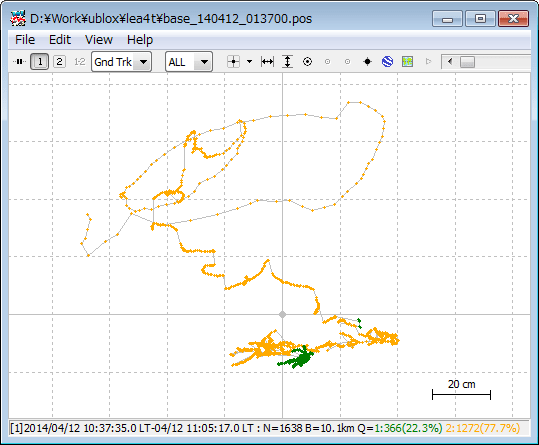
ここでは,base_140412_013700.posというファイルに測位結果が出力されます.
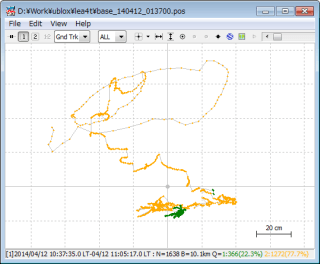
Plotボタンをクリックすると,この測位結果をグラフ表示することができます.
黄色の点がInteger Ambiguityが解けていないFloat解,緑色の点が搬送波位相の
波数が解けたFix解となります.
 (クリックで拡大)
(クリックで拡大)
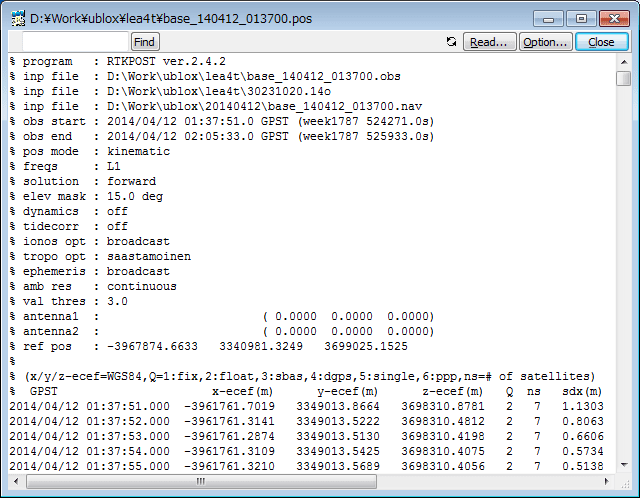
Viewボタンをクリックすると,測位結果のテキストファイルが開かれます.
Qの列が測位解の状態を示しており,2がFloat解,1がFix解となります.
 (クリックで拡大)
(クリックで拡大)
RTKNAVIによるラジコンカーの測位では,今回の処理でRoverであった
基地局アンテナがBase Stationになり,ラジコンカーがRoverになります.
その際の基地局アンテナの精密位置には,測位結果のQが1である
Fix解の座標を使用しています.
まずは測位の基準点となる電子基準点のデータをダウンロードしました.
基地局の観測データは,u-blox社が提供するGPS評価用ソフトウェアの
u-centerを使って取得します.
ublox: u-center GNSS evaluation software for Windows
u-centerと受信機の接続については,こちらをご参照ください.
ここでは,取得されたデータのファイル名をbase_140412_013700.ubxとします.
 (クリックで拡大)
(クリックで拡大)まず,RTKCONVを使用して,このUBXフォーマットのファイルから,標準的な
RINEXフォーマットの観測ファイルと衛星軌道情報ファイルを生成します.
 (クリックで拡大)
(クリックで拡大)RTKCONVを起動し,RTCM, RCV RAW or RINEX OBSのボックスで,UBXファイルを
選択します.Formatには,プルダウンメニューからu-bloxを選びます.
出力ファイルには,RINEX OBS/NAV/GNAV/HNAV/QNAV/LNAV and SBSのリストから,
OBSとNAVをチェックします.
 (クリックで拡大)
(クリックで拡大)次に,Optionsボタンをクリックして,生成するRINEXファイルの詳細を設定します.
ここでは,RINEX Versionに,電子基準点からダウンロードしたRINEXと同じ2.10を選びました.
LEA-4Tの場合,Satellite SystemsはGPSのみ,FrequenciesはL1のみとなります.
Observation TypesにはC(疑似距離),L(搬送波位相),D(ドップラー),S(信号強度)を
選んでいます.
 (クリックで拡大)
(クリックで拡大)設定後にConvertをクリックすると,観測ファイルのOBSと衛星軌道情報ファイルのNAVが
生成されます.
 (クリックで拡大)
(クリックで拡大)これで,基準局のアンテナ位置を求めるために必要なファイルがすべて揃いました.
精密測位を実施するために,RTKPOSTを起動します.
 (クリックで拡大)
(クリックで拡大)RINEX OBS: Roverには,精密位置を求めたい基地局の観測ファイルを選びます.
RINEX OBS: Base Stationには,電子基準点の観測ファイルを選びます.
RINEX NAV/CLKには,衛星軌道情報ファイルを選びます.
 (クリックで拡大)
(クリックで拡大)次に,Optionsボタンをクリックして,測位演算の詳細を設定します.
Setting 1のタブでは,Positioning ModeにKinematicを選びます.
FrequenciesはL1のみ,Elevation Maskは15度としました.
 (クリックで拡大)
(クリックで拡大)Setting 2のタブでは,Integer Ambiguity ResとしてContinuousを選びました.
 (クリックで拡大)
(クリックで拡大)Positionsのタブでは,Base Stationである電子基準点の座標を指定します.
ここでは,電子基準点データ提供サービスからダウンロードした千葉市川の
日々の座標値から,最新の値を入力しました.
 (クリックで拡大)
(クリックで拡大)設定後にExecuteボタンをクリックすると,測位演算が開始されます.
 (クリックで拡大)
(クリックで拡大)ここでは,base_140412_013700.posというファイルに測位結果が出力されます.
Plotボタンをクリックすると,この測位結果をグラフ表示することができます.
黄色の点がInteger Ambiguityが解けていないFloat解,緑色の点が搬送波位相の
波数が解けたFix解となります.
 (クリックで拡大)
(クリックで拡大)Viewボタンをクリックすると,測位結果のテキストファイルが開かれます.
Qの列が測位解の状態を示しており,2がFloat解,1がFix解となります.
 (クリックで拡大)
(クリックで拡大)RTKNAVIによるラジコンカーの測位では,今回の処理でRoverであった
基地局アンテナがBase Stationになり,ラジコンカーがRoverになります.
その際の基地局アンテナの精密位置には,測位結果のQが1である
Fix解の座標を使用しています.












I which to know where to by a tripod (online) for an ublox antenna used as base.
Thanks