








Zedboard+AD-FMCOMMS3でPetalinuxが起動することは確認できたので、
サンプルにモジュールやアプリケーションの追加ができるよう、
このあたりを参考にPetalinuxを基礎から学びます。
1. ZYBO (Zynq) 初心者ガイド (8) Linux起動する
2. Virtual Box上でZybo用にLinuxをビルドする
OSはUbuntu 18.04.6 LTS、VivadoとPetalinuxのバージョンは2021.1です。
ターゲットは、Zybo Z7-20になります。
まずは、DigilentのサイトからVivado Board Filesをダウンロードして、newの
board_filesのフォルダを、/tools/Xilinx/Vivado/2021.1/data/board/にコピーします。
https://github.com/Digilent/vivado-boards
次に、Vivadoを起動し、新規プロジェクトを作成します。
プロジェクト名はデフォルトのままproject_1とします。
Project TypeにはRTL Projectを選択し、Do not specify sources at this timeにチェック。
Default Partでは、Boardタブから先ほどダウンロードしたdigilentint.comのZybo Z7-20を選択。
現時点で、File Versionは1.1、Board RevはB.2となっています。
Projectが作成されたら、Flow NavigatorのIP INTEGRATORから、Create Block Designを起動。
Design nameはデフォルトのまま、design_1とします。
BLOCK DESIGNパネルのDiagramに、Zynqを追加。
Run Block AutomationをクリックしてZynqだけのブロックを作成します。
SoucesタブのDesign Sourcesから、design_1を右クリックし、Create HDL Wrapperを実行。
Optionsには、Let Vivado manage wrapper and auto-updateを選択します。
続いて、Flow NavigatorのPROGRAM AND DEBUGからGenerate Bitstreamを起動します。
ビットストリームが生成されたら、Fileメニューから、Export -> Export Hardwareを選択します。
Outputには、Include bitstreamをチェック。
XSA file nameは、デフォルトのままdesign_1_wrapperとします。
これで、プロジェクトフォルダに、ハードウェア定義ファイルであるdesign_1_wrapper.xsaが生成されます。

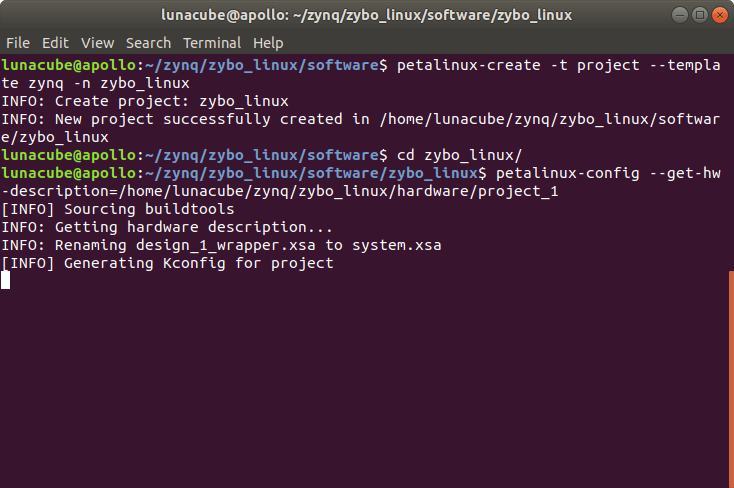
Vivadoでの作業はここまで。次は、Petalinuxのプロジェクトを生成します。
ここでは、プロジェクト名をzybo_linuxにしました。
続いて、ハードウェア定義ファイルのdesign_1_wrapper.xsaがあるフォルダを指定し、
Petalinuxの設定をします。
前回同様に、Yocto SettingsのEnable Network sstate feedsをdisableします。

それ以外はデフォルトのままで、Petalinuxのビルドを実行します。

かれこれ1時間ほどで、ビルドが無事に完了。
image/linuxフォルダに、Linuxシステムのイメージファイルが生成されます。
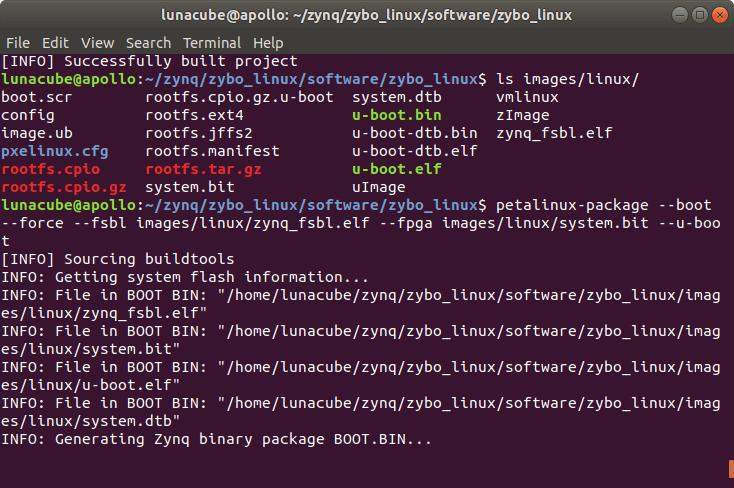
最後に、bootイメージファイル(BOOT.bin)を生成します。

次に、起動用のSDカードを準備します。
GPartedを使い、次のようなBOOTとrootfsのパーティションを作りました。

BOOTフォルダに、image.ub、BOOT.bin、boot.scrをコピーします。

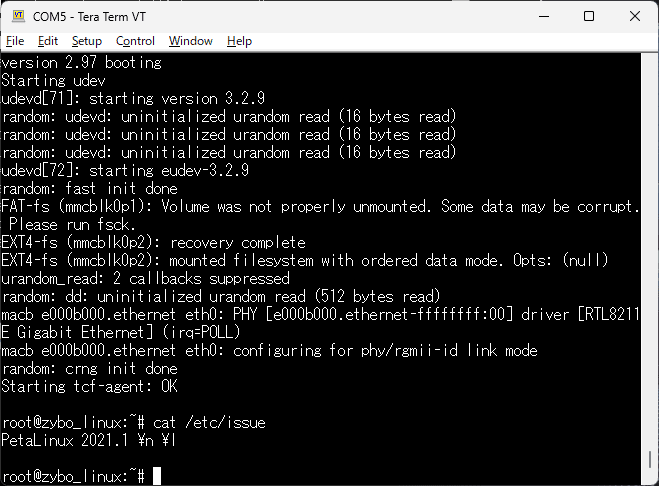
SDカードをZyboのスロットに挿入し、bootのジャンパをSDに切り替え、電源を入れると、
無事にPetalinuxが起動してくれました。
ここまでは順調。次は、GPIOやUARTを追加してみよう。
P.S. Petalinuxのビルドがとにかく遅いので、少しでも速くなるかなと、この動画を参考に
sstateキャッシュとdownloadsファイルをすべてローカルにダウンロードしてみました。
Youtube: PetaLinux 101 - Getting Started Quickly
Petalinuxの設定で、ダウンロードしたファイルのフォルダを指定。




実験的に新しいプロジェクトを作成して、ビルドしてみたところ、さほど改善は見られず。
ネットワークの回線速度よりも、圧倒的にコンパイルが遅い。
ローカルのディスク容量を圧迫するだけなので、利点はなさそうです。
サンプルにモジュールやアプリケーションの追加ができるよう、
このあたりを参考にPetalinuxを基礎から学びます。
1. ZYBO (Zynq) 初心者ガイド (8) Linux起動する
2. Virtual Box上でZybo用にLinuxをビルドする
OSはUbuntu 18.04.6 LTS、VivadoとPetalinuxのバージョンは2021.1です。
ターゲットは、Zybo Z7-20になります。
まずは、DigilentのサイトからVivado Board Filesをダウンロードして、newの
board_filesのフォルダを、/tools/Xilinx/Vivado/2021.1/data/board/にコピーします。
https://github.com/Digilent/vivado-boards
次に、Vivadoを起動し、新規プロジェクトを作成します。
プロジェクト名はデフォルトのままproject_1とします。
Project TypeにはRTL Projectを選択し、Do not specify sources at this timeにチェック。
Default Partでは、Boardタブから先ほどダウンロードしたdigilentint.comのZybo Z7-20を選択。
現時点で、File Versionは1.1、Board RevはB.2となっています。
Projectが作成されたら、Flow NavigatorのIP INTEGRATORから、Create Block Designを起動。
Design nameはデフォルトのまま、design_1とします。
BLOCK DESIGNパネルのDiagramに、Zynqを追加。
Run Block AutomationをクリックしてZynqだけのブロックを作成します。
SoucesタブのDesign Sourcesから、design_1を右クリックし、Create HDL Wrapperを実行。
Optionsには、Let Vivado manage wrapper and auto-updateを選択します。
続いて、Flow NavigatorのPROGRAM AND DEBUGからGenerate Bitstreamを起動します。
ビットストリームが生成されたら、Fileメニューから、Export -> Export Hardwareを選択します。
Outputには、Include bitstreamをチェック。
XSA file nameは、デフォルトのままdesign_1_wrapperとします。
これで、プロジェクトフォルダに、ハードウェア定義ファイルであるdesign_1_wrapper.xsaが生成されます。
Vivadoでの作業はここまで。次は、Petalinuxのプロジェクトを生成します。
ここでは、プロジェクト名をzybo_linuxにしました。
続いて、ハードウェア定義ファイルのdesign_1_wrapper.xsaがあるフォルダを指定し、
Petalinuxの設定をします。
前回同様に、Yocto SettingsのEnable Network sstate feedsをdisableします。
それ以外はデフォルトのままで、Petalinuxのビルドを実行します。
かれこれ1時間ほどで、ビルドが無事に完了。
image/linuxフォルダに、Linuxシステムのイメージファイルが生成されます。
最後に、bootイメージファイル(BOOT.bin)を生成します。
次に、起動用のSDカードを準備します。
GPartedを使い、次のようなBOOTとrootfsのパーティションを作りました。
BOOTフォルダに、image.ub、BOOT.bin、boot.scrをコピーします。
SDカードをZyboのスロットに挿入し、bootのジャンパをSDに切り替え、電源を入れると、
無事にPetalinuxが起動してくれました。
ここまでは順調。次は、GPIOやUARTを追加してみよう。
P.S. Petalinuxのビルドがとにかく遅いので、少しでも速くなるかなと、この動画を参考に
sstateキャッシュとdownloadsファイルをすべてローカルにダウンロードしてみました。
Youtube: PetaLinux 101 - Getting Started Quickly
Petalinuxの設定で、ダウンロードしたファイルのフォルダを指定。
実験的に新しいプロジェクトを作成して、ビルドしてみたところ、さほど改善は見られず。
ネットワークの回線速度よりも、圧倒的にコンパイルが遅い。
ローカルのディスク容量を圧迫するだけなので、利点はなさそうです。












※コメント投稿者のブログIDはブログ作成者のみに通知されます