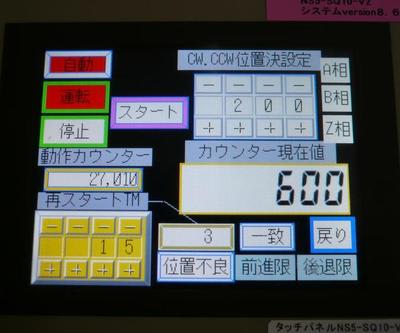
漸くCP1Lシーケンサプログラムが完成し0.5秒間隔で48時間、通しで位置決めする。この間、全く誤差判定不良、停止せず更に運転中。(2パルス以内は正常と判定、1パルス0.225°動く)

タッチパネル画面。
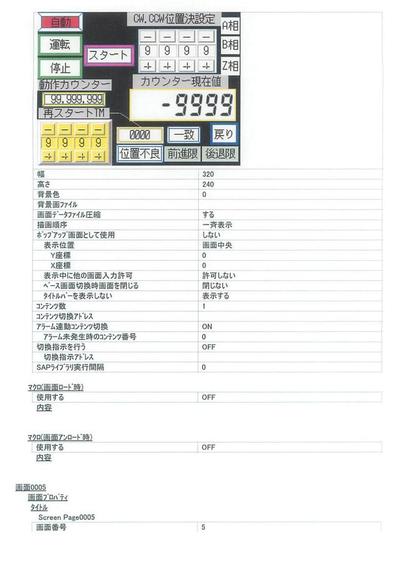
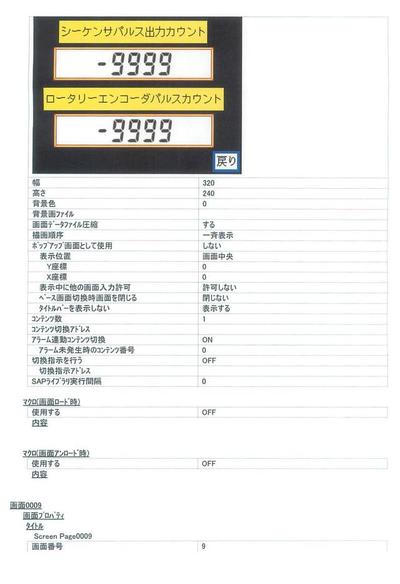
タッチパネル画面作成データ。
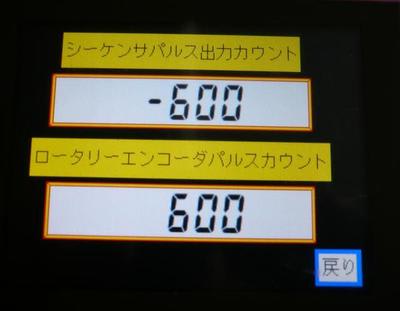
CP1Lシーケンサ出力パルスとロータリーエンコーダパルスカウントは誤差無しで一致。
ステッピングモーターを使用した完全クローズド位置決めシステム。
タッチパネル画面作成データ。
この様なデモ機制御でも色々な技術が必要でハード構成、シーケンサソフト、タッチパネル画面、通信、ステッピングモータードライバ、ロータリーエンコーダ他、多数マスターしなければ完成出来ない。

下記のアドレスを適宜クリックしてユーチューブにアクセスして見て下さい。
①→
https://youtu.be/qHFAUmrGYi0
②→
https://youtu.be/HWW0RsoV2T8
③→
https://youtu.be/dlEulf30AEg
④→
https://youtu.be/K3S2BvmNw_A
⑤→
https://youtu.be/juTcpZT39ic









