








NamuruのHDLコードをGPS受信機として動作させるためには,それを制御するための
マイコンが必要になります.そこで,Simさんが公開されているNios IIのサンプルに
新しいコンポーネントとしてGPSを追加します.
Sim's blog:Qsysを使ってみた
サンプルと大きく異なる点は,Namuruと同様にクロック周波数です.
SimさんのNios IIはDE0-Nanoに搭載されている50MHzのクロックで動作していますが,
Namuru-Nanoではフロントエンドの16.368MHzのクロックを入力します.
そこで,まずclk_0をダブルクリックして,Clock Sourceを開き,周波数を変更します.
 (クリックで拡大)
(クリックで拡大)
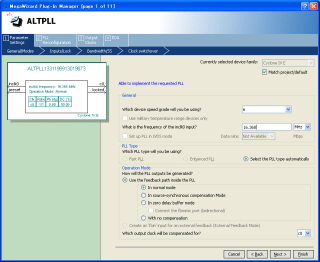
次に,ALTPLLを開き,こちらも入力周波数を16.368MHzに変更します.
 (クリックで拡大)
(クリックで拡大)
さらに,PLLからの出力であるc0のClock multiplication factorを6に設定します.
Nios IIは,16.368MHz*6=98.208MHzで動作することになります.
 (クリックで拡大)
(クリックで拡大)
SDRAMのクロックとなるc1も,同様にClock multiplication factorを6に設定します.
 (クリックで拡大)
(クリックで拡大)
サンプルからの変更はこれだけです.
次に,New Componentをクリックして,GPSコンポーネントを追加して行きます.

まず,HDL Filesのタブで,NamuruのHDLファイルをすべて追加します.
Top Levelのモジュールには,gps_baseband.vを選択します.
 (クリックで拡大)
(クリックで拡大)
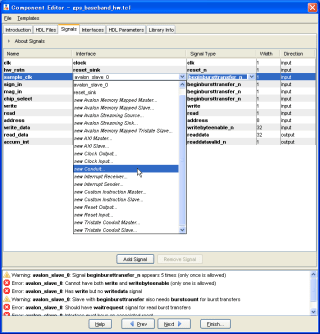
次に,Signalsのタブで,信号のインターフェイスやタイプを設定して行きます.
自動に設定された初期状態ではエラーばかりですので,ひとつひとつ消して行きます.
 (クリックで拡大)
(クリックで拡大)
時々,変更を加えてもエラーや警告が更新されないことがあります.
そんなときは,FileメニューからReanalyze HDL Filesを実行してみてください.

リセット信号のインターフェイスには,new Reset Inputからreset_sinkを選択します.
プルダウンメニューに表示される名称と,選択後にInterfaceとして表示される名称が
異なるので混乱します.これ,なんとかなりませんか,Alteraさん?
 (クリックで拡大)
(クリックで拡大)
さらに,Signal Typeにはreset_nを選びます.
実はこれも紛らわしい.コンポーネントによっては,実際のSignal TypeとSystem Contentsの
画面で表示される名称が異なるものがあります.表示はresetなのに,Signal Typeはreset_nだったり.
これもなんとかして欲しい…
 (クリックで拡大)
(クリックで拡大)
フロントエンドと接続され,外部からの入力となるsample_clk,sign_in,mag_inには
Interfaceとしてnew Conduitからconduit_endを選びます.Signal Typeはexportです.
 (クリックで拡大)
(クリックで拡大)
Nios IIへの割り込み信号となるaccum_intにはInterfaceとしてinterrupt_senderを
選びます.Signal Typeはirqです.
 (クリックで拡大)
(クリックで拡大)
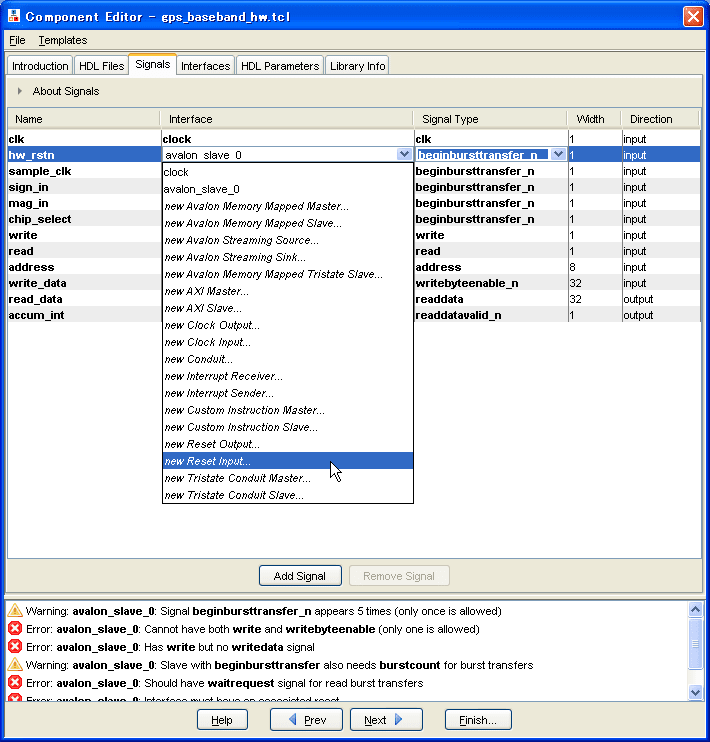
最終的なSignalsのタブは,以下のようになります.これでエラーが2つまで減りました.
 (クリックで拡大)
(クリックで拡大)
次に,Interfacesタブに移り,残りのエラーを解消して行きます.
まず1つめのエラーであるavalon_slave_0のAssociated Resetにreset_sinkを選びます.
 (クリックで拡大)
(クリックで拡大)
続いて,interrupt_senderのAssociated addressable interfaceにavalon_slave_0を選択します.
 (クリックで拡大)
(クリックで拡大)
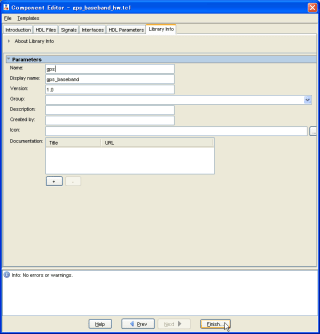
これでエラーがすべて消えましたので,Library Infoタブでコンポーネントの名称を入力して,
Finishをクリックします.
 (クリックで拡大)
(クリックで拡大)
Component Libraryには,新たにgps_basebandが追加されました.これをダブルクリックして
System Contentsに追加します.

他のコンポーネントと同様に,gps_0.clockはaltpll_0.c0に,gps_0.avalon_slave_0は
nios2_qsys_0.data_masterに,gps_0.reset_sinkはclk_0.clk_resetに接続します.
gps_0.conduit_endには,Exportの欄をクリックしてgps_0_conduit_endに設定します.
さらに,gps_0.avalon_slave_0のirqをnios2_qsys_0に接続します.割り込みの優先度は
jtag_uart_0より高く設定します.ここでは0を選びました.
Base adressは0x06000000としています.
 (クリックで拡大)
(クリックで拡大)
これでシステムの生成ができます.GenerationタブでGenerationボタンをクリックしてください.
次に,GPSコンポーネントを追加したQsysモジュールを呼び出すように,DE0_Nano.vを修正します.
Simさんのサンプルとは異なり,.clk_clkにはフロントエンドのサンプリング信号であるGPIO_0_IN[0]が
接続されます.また,GPSモジュールの外部インターフェイスであるgps_0_conduit_endが追加されています.
sample_clk,sign_in,mag_inをそれぞれGPIO_0_IN[0],GPIO_0[1],GPIO_0[0]に接続します.
フロントエンド基板の回路図はこちら.
 (クリックで拡大)
(クリックで拡大)
以上で作業は終了です.あとは論理合成をするだけ.
論理合成の結果を見ると,ロジックエレメントがまだ半分近く余っています.

GPSモジュールのチャンネルを倍近く増やすことができそうです.すばらしい!
GPS+GLONASS受信機が作れると良いけれど,まだまだ妄想の域だな.
マイコンが必要になります.そこで,Simさんが公開されているNios IIのサンプルに
新しいコンポーネントとしてGPSを追加します.
Sim's blog:Qsysを使ってみた
サンプルと大きく異なる点は,Namuruと同様にクロック周波数です.
SimさんのNios IIはDE0-Nanoに搭載されている50MHzのクロックで動作していますが,
Namuru-Nanoではフロントエンドの16.368MHzのクロックを入力します.
そこで,まずclk_0をダブルクリックして,Clock Sourceを開き,周波数を変更します.
 (クリックで拡大)
(クリックで拡大)次に,ALTPLLを開き,こちらも入力周波数を16.368MHzに変更します.
 (クリックで拡大)
(クリックで拡大)さらに,PLLからの出力であるc0のClock multiplication factorを6に設定します.
Nios IIは,16.368MHz*6=98.208MHzで動作することになります.
 (クリックで拡大)
(クリックで拡大)SDRAMのクロックとなるc1も,同様にClock multiplication factorを6に設定します.
 (クリックで拡大)
(クリックで拡大)サンプルからの変更はこれだけです.
次に,New Componentをクリックして,GPSコンポーネントを追加して行きます.
まず,HDL Filesのタブで,NamuruのHDLファイルをすべて追加します.
Top Levelのモジュールには,gps_baseband.vを選択します.
 (クリックで拡大)
(クリックで拡大)次に,Signalsのタブで,信号のインターフェイスやタイプを設定して行きます.
自動に設定された初期状態ではエラーばかりですので,ひとつひとつ消して行きます.
 (クリックで拡大)
(クリックで拡大)時々,変更を加えてもエラーや警告が更新されないことがあります.
そんなときは,FileメニューからReanalyze HDL Filesを実行してみてください.
リセット信号のインターフェイスには,new Reset Inputからreset_sinkを選択します.
プルダウンメニューに表示される名称と,選択後にInterfaceとして表示される名称が
異なるので混乱します.これ,なんとかなりませんか,Alteraさん?
 (クリックで拡大)
(クリックで拡大)さらに,Signal Typeにはreset_nを選びます.
実はこれも紛らわしい.コンポーネントによっては,実際のSignal TypeとSystem Contentsの
画面で表示される名称が異なるものがあります.表示はresetなのに,Signal Typeはreset_nだったり.
これもなんとかして欲しい…
 (クリックで拡大)
(クリックで拡大)フロントエンドと接続され,外部からの入力となるsample_clk,sign_in,mag_inには
Interfaceとしてnew Conduitからconduit_endを選びます.Signal Typeはexportです.
 (クリックで拡大)
(クリックで拡大)Nios IIへの割り込み信号となるaccum_intにはInterfaceとしてinterrupt_senderを
選びます.Signal Typeはirqです.
 (クリックで拡大)
(クリックで拡大)最終的なSignalsのタブは,以下のようになります.これでエラーが2つまで減りました.
 (クリックで拡大)
(クリックで拡大)次に,Interfacesタブに移り,残りのエラーを解消して行きます.
まず1つめのエラーであるavalon_slave_0のAssociated Resetにreset_sinkを選びます.
 (クリックで拡大)
(クリックで拡大)続いて,interrupt_senderのAssociated addressable interfaceにavalon_slave_0を選択します.
 (クリックで拡大)
(クリックで拡大)これでエラーがすべて消えましたので,Library Infoタブでコンポーネントの名称を入力して,
Finishをクリックします.
 (クリックで拡大)
(クリックで拡大)Component Libraryには,新たにgps_basebandが追加されました.これをダブルクリックして
System Contentsに追加します.
他のコンポーネントと同様に,gps_0.clockはaltpll_0.c0に,gps_0.avalon_slave_0は
nios2_qsys_0.data_masterに,gps_0.reset_sinkはclk_0.clk_resetに接続します.
gps_0.conduit_endには,Exportの欄をクリックしてgps_0_conduit_endに設定します.
さらに,gps_0.avalon_slave_0のirqをnios2_qsys_0に接続します.割り込みの優先度は
jtag_uart_0より高く設定します.ここでは0を選びました.
Base adressは0x06000000としています.
 (クリックで拡大)
(クリックで拡大)これでシステムの生成ができます.GenerationタブでGenerationボタンをクリックしてください.
次に,GPSコンポーネントを追加したQsysモジュールを呼び出すように,DE0_Nano.vを修正します.
Simさんのサンプルとは異なり,.clk_clkにはフロントエンドのサンプリング信号であるGPIO_0_IN[0]が
接続されます.また,GPSモジュールの外部インターフェイスであるgps_0_conduit_endが追加されています.
sample_clk,sign_in,mag_inをそれぞれGPIO_0_IN[0],GPIO_0[1],GPIO_0[0]に接続します.
フロントエンド基板の回路図はこちら.
 (クリックで拡大)
(クリックで拡大)以上で作業は終了です.あとは論理合成をするだけ.
論理合成の結果を見ると,ロジックエレメントがまだ半分近く余っています.
GPSモジュールのチャンネルを倍近く増やすことができそうです.すばらしい!
GPS+GLONASS受信機が作れると良いけれど,まだまだ妄想の域だな.












※コメント投稿者のブログIDはブログ作成者のみに通知されます