








2024年5月28日(火曜日) 曇り・夜は大雨
昔工作したときの回路図を見ながらブレッドボードにICを差し込んで
配線を済ませました。
昔は蛇の目プリント基板に部品を取り付けてハンダ付けで配線をした
けど、今はブレッドボードなんていう便利なものがあるので工作は大分
楽になりました。
配線が終わったボードに電源、指示装置代わりのパルス発振器、
オシロスコープを接続してテストをしてみました。

ブレッドボードに組んだ回路はこんなものです。

今はオシロスコープで波形が観測できるので実験も面白いです。
実験も楽しいです。

指示パルス(コントローラから出力されるパルス)の幅と追従パルス(サーボ
モーターのポテンショメーターによって制御されるパルス)の幅を比較して
指示パルス幅 = 追従パルス幅 になるようにモーター(ポテンショメータ)
を制御・回転させる。 指示パルスと追従パルスの幅が同じになったら回転は
停止させる。

ポテンショメーターになるボリュームを指でつまんで回します。
追従パルスの幅が広くなったり狭くなったりします。
サーボモーターに指示を出すコントローラはパルス発振器で
代用しました。 パルス幅も制御できます。
指示パルスと追従パルスの幅を変化させて実験をしました。
すると
指示パルス幅 > 追従パルス幅 のときは 制御出力は「正回転」で
追従パルス幅を広くする方向に出力されます。
ところが 指示パルス幅 < 追従パルス幅 のときは制御出力に
「正回転」と「逆回転」の両方が出力されてしまいます。
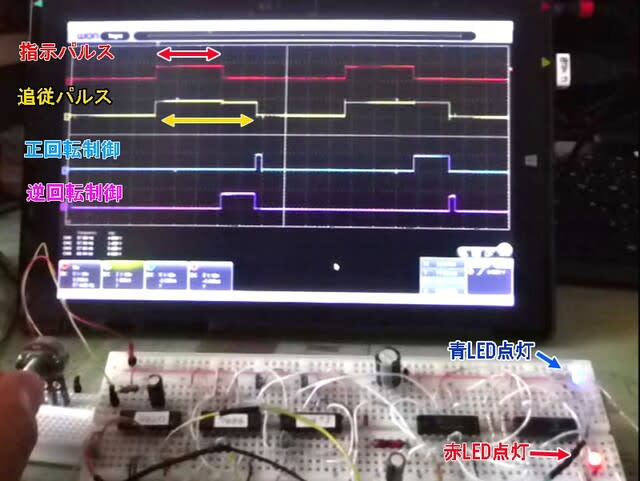
「正回転制御」と「逆回転制御」の出力が出てしまう!!!

こんなテストの様子を動画でご覧ください。
以前の工作失敗の原因はこんなところかも知れません。
ロジックを点検してみます。
(続く)














※コメント投稿者のブログIDはブログ作成者のみに通知されます