2024年6月13日(木曜日) 曇りのち晴れ
今から10年以上も前に工作した「サーボモータ」をもう一度作ってみました。
当時、何かの工作雑誌に掲載されていた記事の回路を真似して手持ちの部品で
組立てましたがうまく動作せず、失敗に終わってしまいました。
今回はジャンク歯車を組み合わせて減速機も自作してみました。
多分前回工作の失敗点だろうと思われる「ポテンショメーター」部分も慎重に
工作しました。
回路は「ブレッドボード」を使って組み上げました。
ブレッドボードはICやコンデンサ、抵抗器、配線コードなどの部品を差し込
んで組み立てていくので回路の変更は自由自在・・・実験にはとても便利です。
回路を組み上げて動作させてみましたがやっぱりうまくいきません。
そこで回路の動きをオシロスコープで観察してみました。
(以前の工作の頃もオシロスコープを持っていましたが、ブラウン管式の
2チャンネルで原因追及まではいきませんでした)
今のオシロは波形をパソコンのディスプレイに表示させるもので4チャンネル
(カラー表示)の高性能(私にとっては・・・)を持っています。
念入りに調べた結果、取り付けてあったTTLーICのSN-7473
(J/K フリップフロップ)に問題があることがわかりました。
これを同じJ/K フリップフロップのSN-74LS73に変更してみたところ
エラーが無くなって正常?に動作するようになりました。
以前の工作の失敗原因はここだったかも知れません。
それから調整を繰り返してやっと何とか動作するようになりました。
サーボモーターの動きは超スローモーションでとても実用になるようなものでは
ありませんが工作したものが動作してくれてとても嬉しいです。
そこで今回の工作を取りまとめて完結編としてご報告いたします。

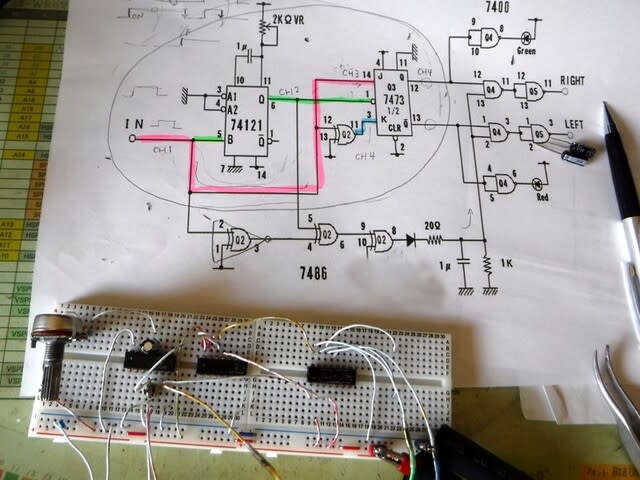
コントローラの回路図です。
タイマーIC 555で極狭いパルスを発振(約30Hz)させ、その
パルスで単安定マルチバイブレータ(SN74121)をキックして
可変長パルスを発生させます。
(この可変長パルスが「指示パルス」になります。)

制御回路は入力された指示パルスの長さ(幅)とポテンショメータの抵抗値で
パルス幅が変化する追従パルスの長さを比較し(Ex-Or(排他的論理和)の
SN-7486で)、ポテンショメータに結合されたモーターを正回転、逆回転
させて両者のパルス幅を同じになるようにモーターの回転を制御します。

モータードライブ回路は制御部からの信号でモーターを正回転方向に回したり
逆回転させたりします。

実験中の様子です。

指示パルス幅 > 追従パルス幅 の場合は追従パルス幅が広がるように
モーターを正回転させます。
これによりモーターに結合されているポテンショメータの抵抗値は「大きく」
なり、追従パルスの幅(長さ)は大きくなっていきます。

指示パルス幅 < 追従パルス幅 の場合は追従パルスの幅(長さ)が短く
なるようにモーターを逆回転させます。
これによりポテンショメータの抵抗値は小さくなり、追従パルスの幅は短く
(狭く)なって行きます。

指示パルス幅 = 追従パルス幅 になるとモーターを回転させる電源はOFFに
なり、モーターは停止します。

実験の様子を動画にしました。
どうぞご覧ください。
ハードウェアだけで制御するサーボモーター工作は難しかったけど、
とても面白かったです。
ソフトウェアで制御するものは細かいところまで調整ができて高性能?
なものができることでしょう。
あの小さなマイコン(マイクロコントローラ)の高機能で便利なこと・・・
時代がハードからソフトに移っていく理由がわかったような気がします。
これで「ハードウェアで制御するサーボモーター工作」を完結といたします。
こんな独りよがりで拙いブログ記事にお付き合いくださった皆様、応援を
誠にありがとうございました。
これからもどうぞよろしくお願いいたします。
何でも工作実習生