2021/04/28(水曜日) 曇りのち雨
悪戦苦闘しながら組み立て、配線をしていたバーサライタ時計2号機のメカ部が出来上がった。
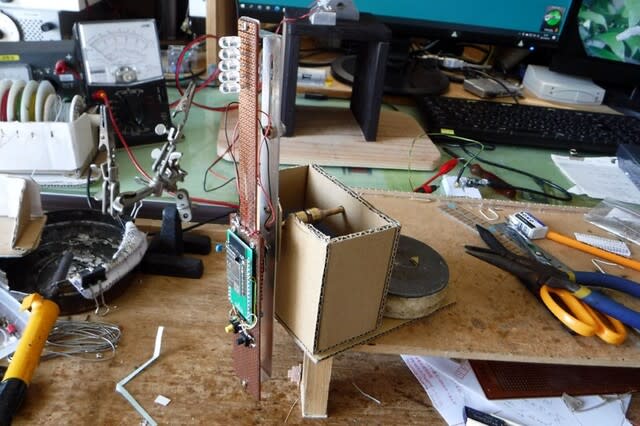
構造は1号機と変わらないが、回転させるLEDの数が2倍になり、回転するマイコンやLEDへ
の電力供給がスリップリング方式になった。
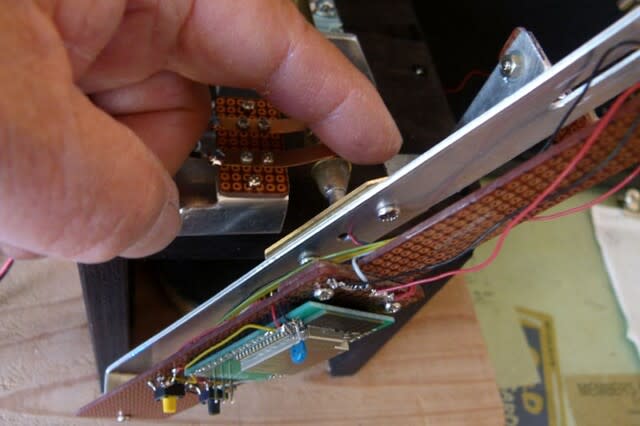
取り付けたLEDは1つのLEDの中に赤(R)、青(B)、緑(G)の3つの発光体が封じ
られていて、それぞれ個別に点灯することができる。
これをすべて利用すれば50個以上のLEDを搭載したのと同等になる。(本当かねぇ・・・)
しかし、実際のところはLEDを制御するマイコンの出力端子が16本程度しかないのでその
16個ぐらいのLEDしか使えない。
LEDは19個取り付けた。


LEDの中にはR、B、G、の発光体が封じられていて個別に点灯できる。
(カソードが共通接続になっているのでその制限があるけど・・・)
また、発光体はそれぞれがかなり離れているのでRBGを同時に点灯しても白色にはならない。
RとGを点灯しても黄色くはならない。
これはちょっとがっかりだった、

まぁ、一応はRBG個別に点灯できるように配線はしたが、これはなかなか面倒な配線だった。



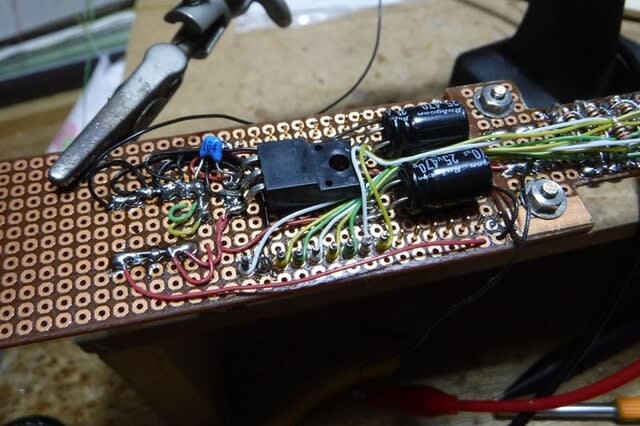

悪戦苦闘を繰り返してやっと出来上がった回転アーム。

回路図はこんなものです。
時針は直線状の表示が回転するだけなのでマイコンの制御端子1つで7個のLEDを点滅操作する。
(マイコンの制御端子(LEDを制御する出力端子)が16個しかないのでこの方法にした。)
制御端子で7個のLEDを点滅させるのは無理なのでトランジスタをかませた。
LEDがカソード共通接地となっているのでエミッタフォロワーで駆動するようにしたが
LEDに加わる電圧が低くて明るさが不足するが止むを得ない。

回転アームを取り付けて回してみる。

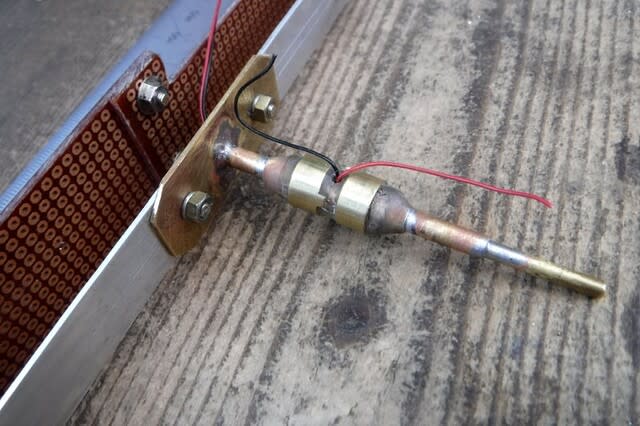
スリップリングとブラシによる電力供給。
動作は良好で発する雑音も以前の円板式より小さい。

簡単な表示用プログラムを組み込んで回転させてみた。
緑色の表示はプログラムには関係なく固定的に表示される。
青色表示は文字盤の時刻表示をさせるようにする。
赤色は秒針、分針、時針を表示させるLEDだ。

テストの様子を動画でご覧ください。
さぁ、次はプログラムの工作だ。 ガンバローっと・・・・・
悪戦苦闘しながら組み立て、配線をしていたバーサライタ時計2号機のメカ部が出来上がった。
構造は1号機と変わらないが、回転させるLEDの数が2倍になり、回転するマイコンやLEDへ
の電力供給がスリップリング方式になった。
取り付けたLEDは1つのLEDの中に赤(R)、青(B)、緑(G)の3つの発光体が封じ
られていて、それぞれ個別に点灯することができる。
これをすべて利用すれば50個以上のLEDを搭載したのと同等になる。(本当かねぇ・・・)
しかし、実際のところはLEDを制御するマイコンの出力端子が16本程度しかないのでその
16個ぐらいのLEDしか使えない。
LEDは19個取り付けた。
LEDの中にはR、B、G、の発光体が封じられていて個別に点灯できる。
(カソードが共通接続になっているのでその制限があるけど・・・)
また、発光体はそれぞれがかなり離れているのでRBGを同時に点灯しても白色にはならない。
RとGを点灯しても黄色くはならない。
これはちょっとがっかりだった、
まぁ、一応はRBG個別に点灯できるように配線はしたが、これはなかなか面倒な配線だった。
悪戦苦闘を繰り返してやっと出来上がった回転アーム。
回路図はこんなものです。
時針は直線状の表示が回転するだけなのでマイコンの制御端子1つで7個のLEDを点滅操作する。
(マイコンの制御端子(LEDを制御する出力端子)が16個しかないのでこの方法にした。)
制御端子で7個のLEDを点滅させるのは無理なのでトランジスタをかませた。
LEDがカソード共通接地となっているのでエミッタフォロワーで駆動するようにしたが
LEDに加わる電圧が低くて明るさが不足するが止むを得ない。
回転アームを取り付けて回してみる。
スリップリングとブラシによる電力供給。
動作は良好で発する雑音も以前の円板式より小さい。
簡単な表示用プログラムを組み込んで回転させてみた。
緑色の表示はプログラムには関係なく固定的に表示される。
青色表示は文字盤の時刻表示をさせるようにする。
赤色は秒針、分針、時針を表示させるLEDだ。
テストの様子を動画でご覧ください。
さぁ、次はプログラムの工作だ。 ガンバローっと・・・・・