









昨年9月より多忙で放置していた1軸ステッピングモーター位置決めデモ機だったが...再度、完成まで漸くチャレンジしてみる事にした。

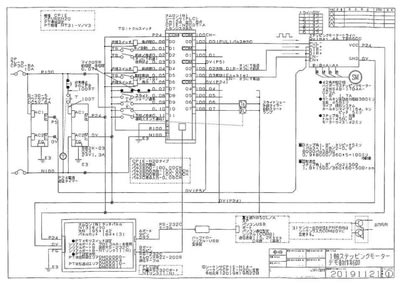
右がDC24Vステッピングモータードライバ、制御はDC5V。

シーケンサCP1E-N20DT-Tトランジスタ出力、これで位置データmmセットし多点位置決め(オープンループ)を行い、原点戻りとなるシステム。
当然、ステッピングモーター加減速、Uターン原点割り出しもシーケンサプログラムにて行う。
ボールネジリードは1回転、5mm移動する仕様のあちら4000年製品...安い。
ノートパソコンは、まだゴミ処分には出来ないウィンドウズXPバージョン。
☆
CAD図面作成、部品購入~ハード、プログラム、タッチパネル画面も全てオリジナル。
デモ機は小さいがプログラムが完成すれば、後は機械が大きなものになっても同じ事。
要するにソフトの頭があれば機械の身体は大きくなっても動くのは同じで強度だけ...。
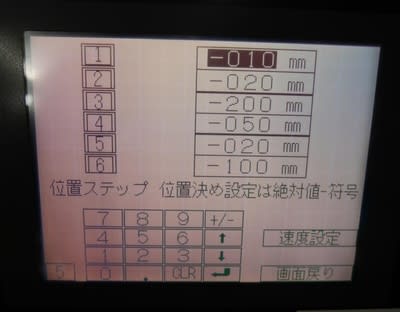
多点位置決めセット画面。
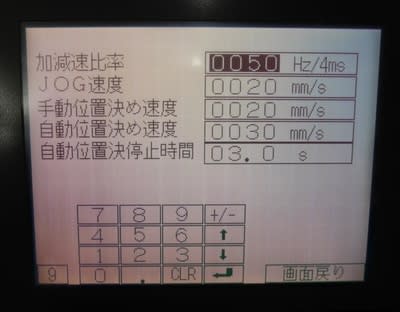
ステッピングモーター速度制御セット画面。

位置決め設定、現在値一致画面。
分解能ステッピングモーター1パルス0.0125m/m(12/1000ミリ精度)。
シーケンサOUT100.00より8000パルス出した場合、0.9*8000/360=20ミリ移動する事になる。
ステッピングモーターステップ角1.8°/2=0.9。
☆
とりあえず試運転テスト終わり...連続にて24時間、無期限に運転させてみる。
ここまで来ればシーケンサでX.Y.Zの3軸テーブルも応用可能となるが趣味で金にもならない事をやっている電気ヤは、ほぼ居ないだろう?。
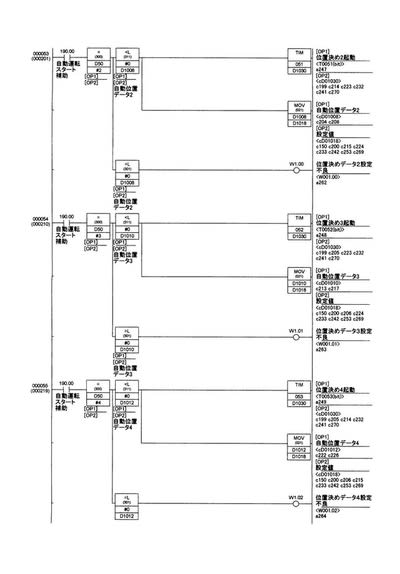
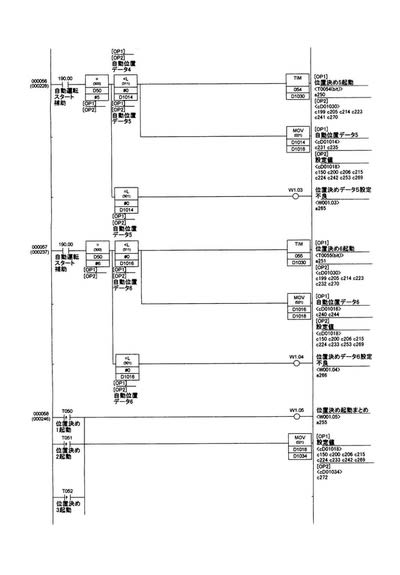
この様なシーケンサプログラムが結構続く...単なるON/OFFのリレー代替プログラムと異なり多彩なデータ応用命令が多く必要となる。
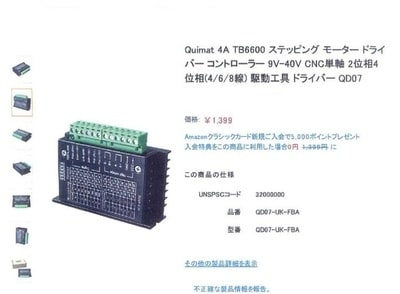
アマゾンより購入、本デモ機に使用したステッピングモータードライバ。
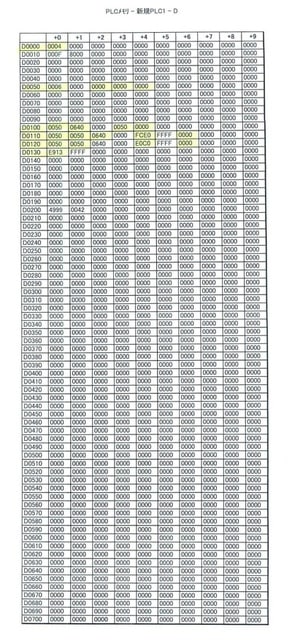
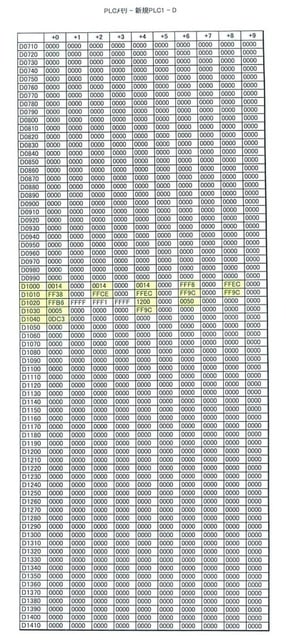
シーケンサCP1E-N20DT-T内のDM(データメモリ)全部で12頁あるが、ほんの一部を使用。