周波数特性(伝達関数)
「運動方程式への応用①」(2009/11/18) にてお話しましたように、この「バネ-質量系」は、例えば列車においては、車体と台車をシンプル化したモデルに相当します。
さて、電車が走りだしました。すると質量Mである車体がガタゴトと揺れ始めます。これはレールが真平らではなく、継ぎ目やゆがみなどの凹凸があるからです。このときのレールを図の地面と等価的にみれば、地面が変位x0(t)で振動していると見なすことができます。地面が振動すれば、バネとダンパを伝って力が車体に伝わり、車体は変位x(t)で揺れます。このときの運動方程式は次のようになります。(図を参照してください)
M x''(t)=-C {x'(t)-x'0(t)}-K{ x(t)-x0(t)} ----- ④
(ただし x(0)=0 x0(0)=0)
M x''(t)=-Cx'(t)+Cx'0(t)-Kx(t)+Kx0(t)
M x''(t)+Cx'(t)+Kx(t)=Cx'0(t)+Kx0(t)
この式をラプラス変換します。
Ms^2X+CsX+KX=CsX0+KX0
X / X0=(Cs+K) / ( Ms^2+Cs+K) ----- ⑤
ここで左辺は L[出力] / L[入力] ですね(出力のラプラス変換/入力のラプラス変換)。これを「伝達関数」といい周波数特性を表します。そして、周波数特性の中身は右辺ということですね。
式⑤を変形していきます。
右辺の分母分子をMでわって
X / X0=(sC/M+K/M) / ( s^2+sC/M+K/M)
ここから少し意味不明の変形をしますが、追って説明しますので、しばらく我慢してください。
X / X0=[sC/{2√(MK)}{2√(MK)/M}+{√(K/M)}^2]
/ [ s^2+sC/{2√(MK)}{2√(MK)/M}+{√(K/M)}^2]
分母分子の2√(MK)/Mは
2√(MK)/M=(2√M√K) / (√M√M)
2√(MK)/M=2√K / √M
2√(MK)/M=2√(K/M)
よって
X / X0=[sC/{2√(MK)}{2√(K/M)}+{√(K/M)}^2]
/ [ s^2+sC/{2√(MK)}{ 2√(K/M) }+{√(K/M)}^2]
ここで
C/ 2√(MK)=ζ √(K/M)}=ω0 として式に代入すると
X / X0=(2ζω0 s+ω0^2 ) / (s^2+2ζω0 s+ω0^2 ) ----- ⑥
このようになります。
ζ(ゼータ)=C/ 2√(MK)は「減衰比」といい、ζ >1のときを過減衰、ζ=1のときを臨界減衰といいます。また2√(MK)は「臨界減衰係数」といい、記号Ccで表します。
つまり ζ=C/Cc
ω0 =√(K/M) は固有振動数[共振角速度(rad/sec)]で、LC回路のω0=1/√(LC)に相当します。固有振動数を周波数で表せば f0(Hz)=1/2π √(K/M) ですね。
【フーリエ変換】
式⑥「伝達関数」のsにjωを代入すると「フーリエ変換」となり、周波数特性を得ることができます。エクセルを使って周波数特性を確認してみましょう。( jは虚数単位 )
まずsにjωを代入して
X / X0=( j2ζω0 ω+ω0^2 ) / (-ω^2+j2ζω0 ω+ω0^2 ) ----- ⑦
分子と、分母が複素数になっているので、これの絶対値を求めます。
まずは分子から。
ω0^2+j2ζω0 ω の実数部=a、虚数部=bとおくと a+jb
複素数a+jbを直交座標に表せば、絶対値は0点からaとbの交点に引いた線分Cですね。
(図を参照してください)
よって、C=√(a^2+b^2)となります。(三平方の定理)
分子についてaとbを元に戻すと
[ω0^2+j2ζω0 ω]=√{(ω0^4+(2ζω0 ω)^2}
次に分母 (ω0^2-ω^2)+j2ζω0 ω は
[(ω0^2-ω^2)+j2ζω0 ω]=√{(ω0^2-ω^2)^2+(2ζω0 ω)^2}
これで式⑦を書き直せば
[X / X0 ]= √{ω0^4+(2ζω0 ω)^2} / √{(ω0^2-ω^2)^2+(2ζω0 ω)^2}
となります。
f0=ω0/2π=2(Hz)
ω0=4π(rad/sec) として
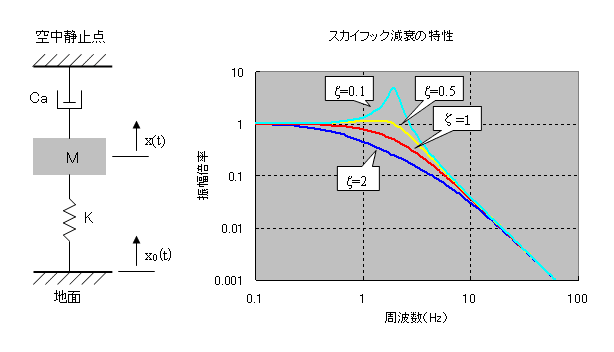
この式をエクセルでグラフ化すると周波数特性は図のようになります。
このグラフは、台車から車体に伝わる振動の振幅倍率を周波数軸で見ています。またダンパによる減衰比(ζ)を変えて、4つの特性を比較しています。
まず低周波から見ていきましょう。約1Hzまでは減衰比が変わっても、振幅倍率はほぼ1ですから台車の振動がそのまま車体に伝わっています。大きく変わるのは「バネ-質量系」の固有振動数(共振周波数)である2Hzと、それ以上の周波数です。
まず固有振動数(2Hz)では減衰比=0.1の場合、台車の振動が7倍程度増幅して車体に伝わっています。電車が動き始めて低速のときには、車体は2Hz辺りで非常によく揺れるということですね。これに対して減衰比=0.8の場合は固有振動数での増幅は極わずかです。
しかし更に周波数が高くなればどうでしょう。例えば10Hzでみると、減衰比=0.1の場合は台車の振動を1/10以下に低減しています。減衰比=0.8の場合は1/3程度でしょうか。
ですから、電車の「バネ-質量系」の固有振動数や減衰費(ζ)を決める折には、電車の走行速度やレールの状態などの条件を十分考慮する必要があるということですね。
関連記事:
「運動方程式への応用①」2009-11-18
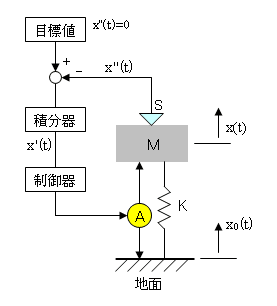
「スカイフックダンパ」2009-11-20