








「運動方程式への応用④ラプラス」
(「スカイフックダンパ」2009-11-20を参照してください)
ちょっと待て!
スカイフックダンパが素晴らしくいいのは分かったが、空中の絶対静止点なんてどこにあるんや!? はい。そうですね。あなたの疑問はもっともです。空中の絶対静止点なんてありません。
しかし
スカイフックダンパは実現可能です。ここで初めて制御という言葉が出てくるのですが、スカイフックダンパの本質は「x'(t)に比例して力を発生するもの」ですから、制御システムとして同様の機能を構成することができるのです。
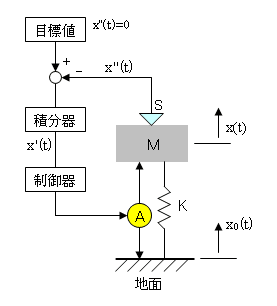
図にシステムの概念を示します。
「S」は加速度センサであり、Mに取り付けられているのでMの加速度x''(t)を検出します。センサが検出した加速度は「積分器」を経て速度x'(t)になります。「A」は電気信号が入力されることにより「力を発生するもの」で、一般にアクチュエータと呼ばれます。(アクチュエータとしてはリニアモータ等がよく用いられます。)「制御器」は入力された信号をアクチュエータ駆動電流として出力するものです。
さて、「積分器」の出力信号x'(t)は「制御器」に入力され、x'(t)に比例した駆動電流をアクチュエータに出力します。そうすると、アクチュエータはまさに「x'(t)に比例して力を発生するもの」になりますね。これがスカイフックダンパを構成するシステム:アクティブダンパの1例です。
【制御系の話】
添付のシステムブロック図は、そのまま制御ブロックも示しています。丸印に向かう2本の矢印に正負の符号が付けてあるのは、センサの検出値と目標値をここで引き算するという意味です。目標値の値はx''(t)=0ですから、ここでの差分が0になるようにアクチュエータが力を発生するわけです。この次がおもしろいのですが、アクチュエータの力によってMに発生した加速度もセンサに検出されることになりますね。それがまた丸印の所で引き算され、その差分をアクチュエータが打ち消しにいくという循環が永遠に続きます。このような制御をフィードバック制御といいます。
関連記事:「スカイフックダンパ」2009-11-20
(「スカイフックダンパ」2009-11-20を参照してください)
ちょっと待て!
スカイフックダンパが素晴らしくいいのは分かったが、空中の絶対静止点なんてどこにあるんや!? はい。そうですね。あなたの疑問はもっともです。空中の絶対静止点なんてありません。
しかし
スカイフックダンパは実現可能です。ここで初めて制御という言葉が出てくるのですが、スカイフックダンパの本質は「x'(t)に比例して力を発生するもの」ですから、制御システムとして同様の機能を構成することができるのです。
図にシステムの概念を示します。
「S」は加速度センサであり、Mに取り付けられているのでMの加速度x''(t)を検出します。センサが検出した加速度は「積分器」を経て速度x'(t)になります。「A」は電気信号が入力されることにより「力を発生するもの」で、一般にアクチュエータと呼ばれます。(アクチュエータとしてはリニアモータ等がよく用いられます。)「制御器」は入力された信号をアクチュエータ駆動電流として出力するものです。
さて、「積分器」の出力信号x'(t)は「制御器」に入力され、x'(t)に比例した駆動電流をアクチュエータに出力します。そうすると、アクチュエータはまさに「x'(t)に比例して力を発生するもの」になりますね。これがスカイフックダンパを構成するシステム:アクティブダンパの1例です。
【制御系の話】
添付のシステムブロック図は、そのまま制御ブロックも示しています。丸印に向かう2本の矢印に正負の符号が付けてあるのは、センサの検出値と目標値をここで引き算するという意味です。目標値の値はx''(t)=0ですから、ここでの差分が0になるようにアクチュエータが力を発生するわけです。この次がおもしろいのですが、アクチュエータの力によってMに発生した加速度もセンサに検出されることになりますね。それがまた丸印の所で引き算され、その差分をアクチュエータが打ち消しにいくという循環が永遠に続きます。このような制御をフィードバック制御といいます。
関連記事:「スカイフックダンパ」2009-11-20





