LCRの微分方程式は、まったくそのままバネ-質量系の運動方程式に置き換えることができます。
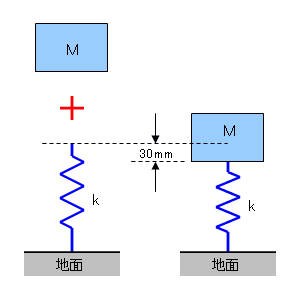
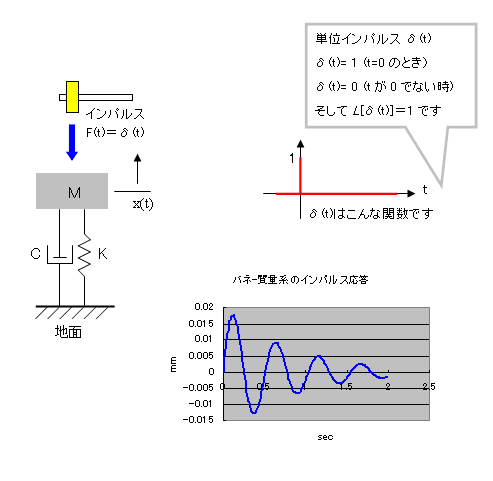
図は、質量Mを(バネ定数Kの)バネで支持し、バネと並列に減衰器(ダンパ)Cを取り付けたモデル図です。電車であれば台車と車体との関係、自動車であればボディーとサスペンションの関係に相当します。このようなモデルを「バネ-質量系」といいます。外部からの入力が無ければ、車体重量とバネの反発力がバランスしてモデルは静止しています。
では、この「バネ-質量系」に図のようにインパルスを入力すると車体(M)はどのような動きをするでしょうか。外部から力が加わるのですから、車体に変位(位置移動)が発生しますね。この変位をx(t)で表します。
初めに、このモデルが静止しているときの運動方程式を示します。
(あるいは調和振動しているとき)
M d^2x(t)/dt^2=-C dx(t)/dt-K x(t)
これを簡潔に次式のように記述してもOKです。
M x''(t)=-C x'(t)-K x (t) ----- ①
まずM x''(t)ですが、「質量M×加速度x''(t)=力」です。
例えば水10lが10kgであるのは、水の質量に重力加速度(9.8m/sec^2)がかかっているからです。よって10lの水を持ち上げるためには10kg以上の腕力が必要ということです。
次にC x'(t)ですが、「減衰係数C×速度 x'(t)=力」です。これは容器に溜めたシリコンオイルを棒でかき混ぜることを想像してみてください。ゆっくり棒を動かせばさほど力は要りませんが、速く動かそうとするとより強い力が必要ですね。このように減衰成分は速度に比例して力を発生します。
最後にK x(t)はバネの反発力です。「バネ定数K×変位x(t)=力」となります。また、減衰力とバネ力は、発生する力の方向が質量Mと逆なのでマイナスが付きます。
【コラム】
距離(変位)m / 時間s=速度m/s 速度m/s / 時間s=加速度m/s^2 ですね。
それぞれの瞬時値を表す場合は
x(t)=距離(変位)とすると、dx(t)/dt=速度、d^2x(t)/dt^2=加速度となります。
つまり、変位を微分すると速度、速度を微分すると加速度ということです。逆に、加速度を積分すると速度、速度を積分すると変位に戻ります。
さて、式①の減衰力と、バネ力を左辺に移項して
M x''(t)+C x'(t)+K x(t)=0 ----- ②
これが「バネ-質量系」の、静止状態の微分方程式です。
そして、質量Mにインパルス[F(t)=δ(t)]を入力した場合は
M x''(t)+C x'(t)+K x(t)=δ(t) ----- ③となります。
(ただし x(0)=0 )
では、ラプラス変換して式③を解いていきましょう。
M s^2X+C sX+KX=1
X=1/ (M s^2+C s+K)
右辺の分母分子をMで割ると
X=1/M / ( s^2+sC/M+K/M)
ここでLCR回路の式と比べてみましょう。
I=E/L / (s^2 + sR/L + 1/LC) -----「LCR回路の単位応答」
ね、形がそっくりでしょ?
さて、どんどんいきます。
X=1/M / {( s+C/2M)^2+K/M-C^2/4M^2}
ここでパラメータに数値を入れます。
M=4k (kg) C=10k (kg・m/s) K=600k (N/m)としましょう。質量M=車体重量/重力加速度
(1/M=0.25m C/2M=1.25 K/M=150 C^2/4M^2=1.56)
X=0.25m /{(s+1.25)^2+150-1.56}
X=0.25m /{(s+1.25)^2+12.22}
X=(0.25m / 12.2) 12.2 /{(s+1.25)^2+12.2^2}
では、f(t) = ebtsin at ⇔ F(s)=a/{(s-b)^2+a^2} の変換式に当てはめて逆ラプラス変換します。
x(t)=20.5μ e^-1.25 t sin 12.2 t
(ωn=12.2 fn=1.94Hz)
となりました。得られたx(t)を図に示します。
約2Hzの減衰波形ですね。
関連記事:
「LCR回路の過渡特性」2009-05-11
「運動方程式への応用②」2009-11-19
図は、質量Mを(バネ定数Kの)バネで支持し、バネと並列に減衰器(ダンパ)Cを取り付けたモデル図です。電車であれば台車と車体との関係、自動車であればボディーとサスペンションの関係に相当します。このようなモデルを「バネ-質量系」といいます。外部からの入力が無ければ、車体重量とバネの反発力がバランスしてモデルは静止しています。
では、この「バネ-質量系」に図のようにインパルスを入力すると車体(M)はどのような動きをするでしょうか。外部から力が加わるのですから、車体に変位(位置移動)が発生しますね。この変位をx(t)で表します。
初めに、このモデルが静止しているときの運動方程式を示します。
(あるいは調和振動しているとき)
M d^2x(t)/dt^2=-C dx(t)/dt-K x(t)
これを簡潔に次式のように記述してもOKです。
M x''(t)=-C x'(t)-K x (t) ----- ①
まずM x''(t)ですが、「質量M×加速度x''(t)=力」です。
例えば水10lが10kgであるのは、水の質量に重力加速度(9.8m/sec^2)がかかっているからです。よって10lの水を持ち上げるためには10kg以上の腕力が必要ということです。
次にC x'(t)ですが、「減衰係数C×速度 x'(t)=力」です。これは容器に溜めたシリコンオイルを棒でかき混ぜることを想像してみてください。ゆっくり棒を動かせばさほど力は要りませんが、速く動かそうとするとより強い力が必要ですね。このように減衰成分は速度に比例して力を発生します。
最後にK x(t)はバネの反発力です。「バネ定数K×変位x(t)=力」となります。また、減衰力とバネ力は、発生する力の方向が質量Mと逆なのでマイナスが付きます。
【コラム】
距離(変位)m / 時間s=速度m/s 速度m/s / 時間s=加速度m/s^2 ですね。
それぞれの瞬時値を表す場合は
x(t)=距離(変位)とすると、dx(t)/dt=速度、d^2x(t)/dt^2=加速度となります。
つまり、変位を微分すると速度、速度を微分すると加速度ということです。逆に、加速度を積分すると速度、速度を積分すると変位に戻ります。
さて、式①の減衰力と、バネ力を左辺に移項して
M x''(t)+C x'(t)+K x(t)=0 ----- ②
これが「バネ-質量系」の、静止状態の微分方程式です。
そして、質量Mにインパルス[F(t)=δ(t)]を入力した場合は
M x''(t)+C x'(t)+K x(t)=δ(t) ----- ③となります。
(ただし x(0)=0 )
では、ラプラス変換して式③を解いていきましょう。
M s^2X+C sX+KX=1
X=1/ (M s^2+C s+K)
右辺の分母分子をMで割ると
X=1/M / ( s^2+sC/M+K/M)
ここでLCR回路の式と比べてみましょう。
I=E/L / (s^2 + sR/L + 1/LC) -----「LCR回路の単位応答」
ね、形がそっくりでしょ?
さて、どんどんいきます。
X=1/M / {( s+C/2M)^2+K/M-C^2/4M^2}
ここでパラメータに数値を入れます。
M=4k (kg) C=10k (kg・m/s) K=600k (N/m)としましょう。質量M=車体重量/重力加速度
(1/M=0.25m C/2M=1.25 K/M=150 C^2/4M^2=1.56)
X=0.25m /{(s+1.25)^2+150-1.56}
X=0.25m /{(s+1.25)^2+12.22}
X=(0.25m / 12.2) 12.2 /{(s+1.25)^2+12.2^2}
では、f(t) = ebtsin at ⇔ F(s)=a/{(s-b)^2+a^2} の変換式に当てはめて逆ラプラス変換します。
x(t)=20.5μ e^-1.25 t sin 12.2 t
(ωn=12.2 fn=1.94Hz)
となりました。得られたx(t)を図に示します。
約2Hzの減衰波形ですね。
関連記事:
「LCR回路の過渡特性」2009-05-11
「運動方程式への応用②」2009-11-19