エンコーダの基礎から応用
モーター制御に不可欠なエンコーダ、その多様な用途 (1/3)回転/移動体の移動方向や移動量、角度を検出する電子部品である「エンコーダ」。ニッチな部品かもしれませんが、本当にさまざまな機器に活用されています。今回は、エンコーダについて知って頂き関心を持ってもらうことを目的に、エンコーダの概略や多様なアプリケーションを紹介します。
回転したり水平移動したりするさまざまな機器/装置の移動方向や移動量、角度を検出する役割を担っているのが、「エンコーダ」と呼ばれる電子部品です。
確かに、エンコーダはニッチな部品かもしれません。
しかし、皆さんが予想しないような機器も含めて、本当にさまざまな場面で活用されています。現在、「エンコーダはモーターと組み合わせて使うもの」というのが一般的な認識です。ただそれだけではなく、さまざまなアプリケーションでも活躍しています。
「エンコーダの基礎から応用」と題する本連載では、エンコーダのさまざまな魅力を紹介します。

第1回となる今回は、エンコーダの概略やアプリケーションの例を取り上げます。第2回と第3回では、エンコーダの動作原理や、特徴を詳しく解説する予定です。ひと言でエンコーダと言っても、幾つかの動作原理や出力形態があります。エンコーダの全体像をまとめ、種類ごとのメリット/デメリット、特徴を分かりやすく整理します。その後、最終回となる第4回では、エンコーダを実際に利用するときに知っておくと役立つ事柄に話題を移します。
実際のアプリケーションの回路例などを紹介します。
さまざまな機器/装置の移動方向や移動量、角度を検出する「エンコーダ」身近な機器の縁の下の力持ち。
なじみの薄いエンコーダを紹介するに当たり、皆さんが日々使用している「エレベータ」を例にエンコーダの役割を説明しましょう。まず、エレベータを利用する一連の流れを想像してください。「△▽」のボタンを押してエレベータを呼ぶと、しばらくしてエレベータが到着し扉が自動的に開いて、中に乗り込むことができます。その後、エレベータ内部の階数表示ボタンと閉ボタンを押すと扉が閉まり、しばらく経つと目的階に到着することができます。
さて、この一連の流れ中で2つのエンコーダが使用されていますが、お気付きになりましたでしょうか? まず1つは、エレベータを移動させるためのモーター制御に使われています。エレベータは、モーターが回転する力で上下に動いていますので、回転方向が分かれば、エレベータが上昇しているか、下降しているか分かります。また、モーターの移動量(回転数)を検出することで、エレベータがどれだけ移動したかを把握できます。エンコーダで得られるこのような情報をエレベータの制御盤で管理することで、目的の階に迅速に移動させることができるのです。
もう1つは、エレベータの扉を自動的に開閉するモーター部分です。この扉ですが、動きをよく見てみるときめ細かく制御されていることが分かります。扉を開け始めたタイミングと最後のタイミングはゆっくりとした動きになっており、その途中は早めに動いて開閉時間の短縮を図っています。モーターの動きをエンコーダで正確に把握し、制御することでこのような細やかな動作を実現しています。
エレベータが世の中に登場し始めたころは、まだエンコーダが普及しておらず、上に述べたエンコーダの仕事を全部人間が担当していました。「△▽」の代わりに呼び鈴があり、エレベータの中にいるエレベータボーイ/エレベータガールが呼び鈴の音を頼りに、スイッチを操作してエレベータを移動させていました。モーターの回転方向や回転数を測定するエンコーダのおかげで、便利なエレベータへと進化してきたのです。
エンコーダの仕組みとは?
それでは、エンコーダを使ってどのように、「回転方向」、「回転位置」、「回転速度」を知ることができるのでしょうか? 光学透過型エンコーダを例に、概要を解説しましょう。
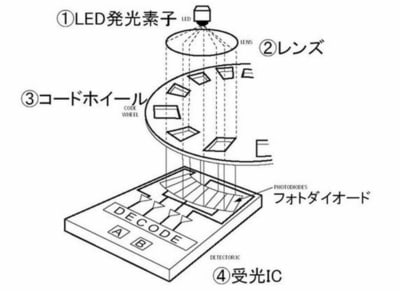
当社の標準的な光学透過型エンコーダの概略図を図2に示しました。主要な構成部品は、(1)LED発光素子、(2)レンズ、(3)コードホイール(回転スリット円板)、(4)受光ICです。受光ICの部分は各社さまざまな形態がありますが、ここでは当社の標準的な構造で説明しましょう。
光学透過型エンコーダの概略図
まず、(1)の「LED発光素子」からの光は錯乱光であるため、(2)の「レンズ」にて集光して平行光に近づけます。(3)の「コードホイール」には、長方形の穴が開いたスリット部と、穴が開いていない部分が有ります。このスリットは1周にわたり等間隔で穴が開いています。スリットを通った光が、受光IC上のフォトダイオードに伝わり、信号変換回路部で処理されて、最終的には「チャネルA(A相)」、「チャネルB(B相)」という2系統の方形波として出力されます。
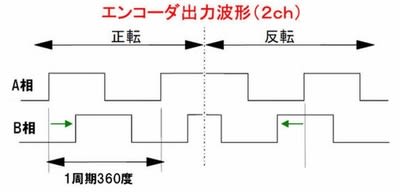
A相とB相の位相関係は世界中のどのメーカーでも共通で、B相はA相から1/4周期ずれて出力されます。このA相、B相という2系統のエンコーダ出力をうまく処理することで、モーターの「回転方向」や「回転位置」、「回転速度」を知ることができるのです。それでは、どのように検出するのか1つ1つ説明しましょう。
エンコーダの2つの出力波形(「A相」と、1/4周期遅れた「B相」)回転方向の検出
A相とB相のどちらが先に立ち上がるかを検出することで、回転円板(コードホイール)を取り付けた回転軸の回転方向を判別できます。例えば、エンコーダの回転円板(コードホイール)が正転(時計方向)へ回転している時、A相よりもB相が遅れて立ち上がるとします。このとき、回転ディスクが反転(反時計方向)へ逆回転すると、物理的な回転円板の回転方向が反転するだけなので、今度はB相がA相よりも先に立ち上がります(図3)。またこのような仕組みは、回転方向だけではなく、水平(リニア)駆動時の移動方向の判別にも使えます。
回転位置の検出
回転円板(コードホイール)には物理的に光を遮る/透過するスリットが1周期にわたり、等間隔で設けられています。ここでは例として、1周期に360個のスリットが設けられているとします。1つのスリット当たり1つのパルスが出力されますので、1パルス当たり1度の回転位置が検出できることになります。1周期に3600個のスリットを設けた回転円板(コードホイール)にして、同じように検出すれば、0.1度の角度が検出できます。
さらに、A相とB相の2つの出力信号を使用すると、4倍の角度分解能を実現できます。これは、A相とB相のそれぞれの波形の立ち上がり/立ち下がり位置をカウントすることで、物理的に設けたスリット数よりも細かい角度位置を検出できるからです。また、これらの応用例として回転軸に50歯のギアが付いている場合、回転円板(コードホイール)に50個のスリットがあれば、1歯ずつ制御することができます。
回転速度の検出
エンコーダから出力される1周期のパルス時間と1周期当たりの出力パルス数を測定することで、下記の式を使って容易に算出できます。
回転速度(r/min)=(1/(1周期の時間×パルス数))×60
以上のような動作をするエンコーダをうまく使うことで、モーターの回転方向や回転位置、回転速度を制御することができます。前述のエレベータの例ですと、図4のようにマイクロプロセッサからの制御信号に基いてモーターを駆動すると、回転したモーター軸に付いているコードホイール/エンコーダから信号が出力されます。その後、エンコーダの出力をエンコーダカウンタで処理して、マイクロプロセッサの制御信号と差動比較をしています。モーターを動かすための制御信号とモーター回転の結果を比較することで、狙った回転数に必要な電力だけがモーターに供給されるという仕組みです。このように閉ざされた構成の中で比較演算する形態のことを、「クローズドフィードバックループ」もしくは「クローズドループ」と呼びます。
エンコーダを使ってモーターを制御するシステム例
「精度良く動いてほしい」を実現
ここまでで、エンコーダの働きがおおよそ見えてきたと思います。これからエンコーダがどのようなアプリケーションに使われているかに話題を移しましょう。
前述の通り、エンコーダは何のために使うのか?という質問に対する最も簡単な答えは、「回転/移動するさまざまな物体の移動方向や移動量、角度を検出するため」となります。従って、エンコーダが一般的に使われているアプリケーションとしては「モーターで動かしている何らかの機器」を挙げることができます。
これではあまりにも範囲が広すぎるので絞り込むと、「いいかげんに動いてほしくなく、精度良く動いてほしい機器」と言い換えることができます。例えば、扇風機や換気扇は、ある程度ムラのある回転でも使用上は基本的に問題ありませんので、エンコーダは使われていません。これに対して、工業用ロボットや無人搬送機、工作機械、各種工業用製造装置など、高い精度で動作させる必要のある装置にはエンコーダが広く使われています。
この他にも、冒頭で紹介したエレベータのように身の回りにも「精度良く……」という要望に当てはまる製品は多いですし、ここ数年で普及してきたハイブリッド自動車や電気自動車にもエンコーダが使われています。
モーターあるところに「エンコーダ」あり
ここまでいろいろと説明してきた中で、エンコーダのアプリケーションに、「電気」という共通事項があることに気付きましたでしょうか? 回転/水平移動には、電気で駆動する動力源であるモーター以外にも、油圧や空気圧による駆動方式が使われることがあります。しかし、これらの油圧や空気圧の装置では、エンコーダの採用例はほとんどありません。
なぜでしょうか? まず、モーターの場合は電源スイッチをオン/オフすることで、すぐに回転させたり回転を止めたりできます。モーターに流す電圧や周波数を制御すれば、回転数も容易に変えられます。これらの動作は高い応答性がありますので、エンコーダを使うことで、精度良く迅速にモーターを制御できるのです。
これに対して油圧が動力源の場合は、油圧を上昇させてから対象物(例えば、プロペラ)が動くまでに時間がかかるため、モーターと同じようにエンコーダを使って制御するのは難しいのです。プロペラを動かし始めるときだけではなく、回転数を変える場合も、プロペラはすぐには反応せずゆっくりと変化します。これは、プロペラを動かす油圧の動きが、油の粘性や配管などの抵抗に制限されているからです。油圧の変化とプロペラの回転数のタイムラグは、回転数を測定するエンコーダを使った制御を難しくさせます。これは空気圧を採用した装置でも同様です。
実際にエンコーダが使われている用途を、「昔から使われてきた採用事例」と「最近の採用事例」に分けて、幾つか挙げました。
昔から使われてきた採用事例
(1)ステッピングモーターと組み合わせて「脱調検出」
ステッピングモーターはパルス状の電流をコイルに流し、そのパルスに連動した動作角度だけ回転するモーターです。従って、フィードバック制御しなくても、基本的にはモーターの回転方向、回転角度はコントローラ側で認識できます。しかし、何らかの障害が発生し、パルス電流通りに動作していない状態(これを「脱調」と呼びます)になると、コントローラ側と実動作の間に誤差が生じてしまいます。高価格品や高精度を必要としているアプリケーションでは誤差が問題になるため、誤差を検出してコントローラ側で補正するために、エンコーダを搭載しています。
(2)工作機械のX-Y駆動テーブルの位置検出
加工物が載った台(=テーブル)のX軸-Y軸(水平方向)の移動制御にエンコーダが使われています。例えば、NCフライス盤や放電加工機などでは、数μm~数10μm単位での仕上げ精度を要求されます。これを実現するためには、要求されている仕上げ精度の10倍(10μmの要求仕上げ精度であれば1μm)のエンコーダ分解能が必要です。エンコーダが使われる環境は、切削加工であれば切削熱、切削粉、切削油、振動などが、放電加工であれば放電による電波/電導ノイズの影響があります。このような厳しい使用環境であっても、加工精度を向上させることを目的に、エンコーダ分解能への要求は上がることはあっても、下がることはありません。
(3)インクジェットプリンタの印刷制御
インクジェットプリンタのインクヘッドの動作制御に、エンコーダが使われています。「シアン」、「マゼンタ」、「ブラック」などをどのようなタイミングで印刷するかという制御信号をエンコーダが生成します。また、水平方向の印刷が終わったら紙を移動させて次のエリアを印刷しますが、その時に紙を移動させる回転ドラムの制御にもエンコーダが使われています。
☆
エンコーダを大変わかりやすく解説しているネット記事があったのでコピペさせて頂きました。
この中で応用例としてエレベータが出ていましたので当方がオリジナルで平成20年に製作したエレベータデモ機を、またまたUPいたします。
これは長文なので次の発信ブログとなります。