仮称四號電波探信儀三型・取扱説明書(案)の解説について
はじめに
本説明書は旧海軍の資料であるため、カタカナ表記の旧軍隊用語で記述されており、分かりにくいことから現代文に改めています。
また、電気専門用語も海軍特有のものとして、電源系では「翼板」といえば「陽極」のことを意味したり、「夛調波発振管」といったような用語は直接的現代訳することが困難な用語もあります。
また、海軍では、「高角」といった用語がありますが、「仰角」のことを意味します。
なお、サーチライトのことを陸軍では「照空灯」といい、海軍では「探照灯」といいます。
極力、特殊な用語については注釈をつけて説明するこことします。
本資料である仮称四號電波探信儀三型・取扱説明書(案)については、原理や理論については基本的には原文を提示し、更にその補足説明や解説を行い、当時の海軍技術研究所の技術士官や日本電気(当時の住友通信工業)の技術者がどのようなアプローチで問題を解決したか明らかにします。
更に、本書は仮称四號電波探信儀三型の原型機(43号L-1)の資料であり、敗戦後米軍に提出した取りまとめられたReports of the U.S. Naval Technical Mission to Japan, 1945-1946に最終バージョンである四號電波探信儀三型改二(43号L-3)のブロックダイヤグラムが掲載されているので、原型機との比較を行い、どのような性能改善が行われたかを最後に概観するこことします。
仮称四號電波探信儀三型・取扱説明書(案)の原書については下記のアドレスでPDF化していますので参考にしてください。https://drive.google.com/file/d/1JBG3rFgZ6LzloG0tJMZMkfn-LIOzaxbw/view
仮称四號電波探信儀三型 取扱説明書(案)
第一章 概説
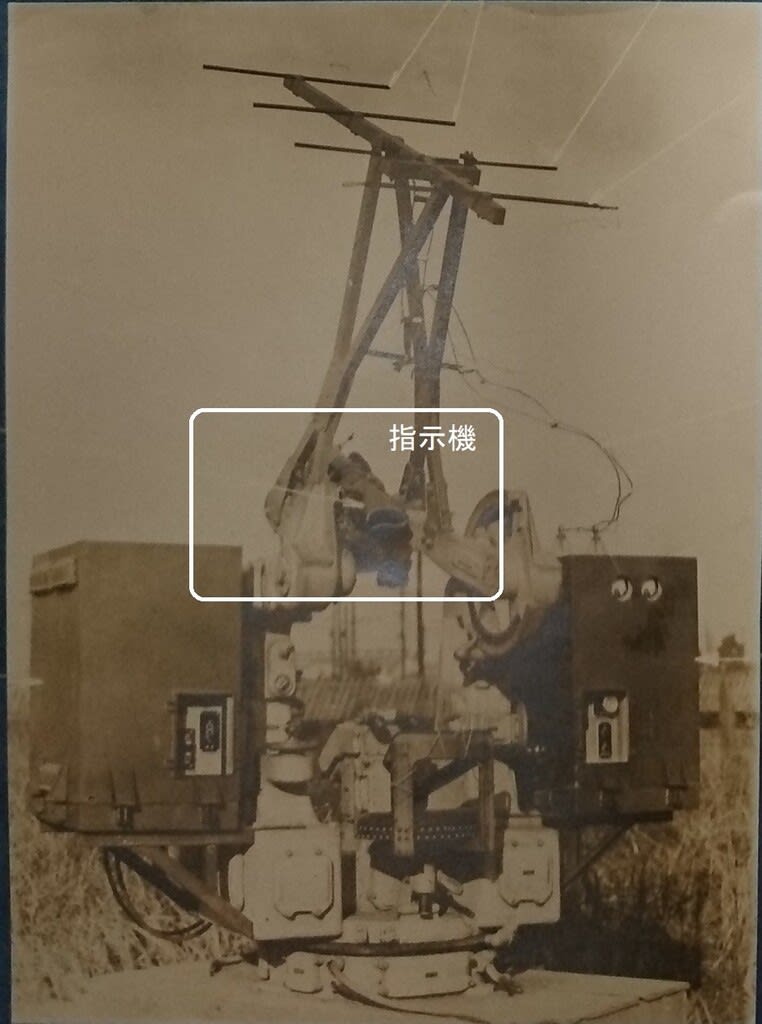
本電波探信儀は完成探照灯指向用として設計したものにして、小型、軽量、取扱簡単なるを特徴とする。特に空中線は大きさに大なる制限を加え、受信空中線は探照灯前面に、送信空中線は管制器の上部に取付け、現用探照灯及び管制器を、本探信儀空中線架台に使用し得るようにした。尚追尾用の指示機は管制器の眼鏡上に設け、眼鏡と並用して探照灯の管制を行う。
本機は見張用電波探信儀と異なり有効距離は左程大きくないけれども、方向角及び高角の測定精度並びに測距精度の向上を計っている。即ち空中線は旋廻を行った共に俯仰も可能となり高角を測定すると同時に空中線の指向特性を、左右上下に振り、振幅比較方式を採用しているため、方向、高角の精度、極めて良好にして且つ移動方向をも探知することができる長所があり、又距離の測定には追尾式新測定方式を採用しているため、連続的に正確なる距離を求めることができる。航空機等多数来襲せる場合、其の一機を分離照準する必要があり、之の為本機には選択回路を設け、目標を分離追尾し得ることができる。
本機は主として対航空機用なるも其の他、対水上艦艇用にも使用することができ、又艦艇装備に適する如く小型に設計しているので、之を陸上探照灯指向用に使用するも、十分其の性能を発揮することができる。
本機は前述の通り探照灯指向用であるが、之を利用して射撃を実施する場合、距離は本機より直接求める方向高角に関しては先ず本機により目標物を追尾し、其の方向、高角を利用することを原則とする。但し探照灯照射による追尾不能の場合には本機により追尾する方向高角により直接射撃を実施するも相当の効果があるものと思われる。
第二章 要旨
第一節 構造及び能力の概要
一 用途 探照灯指向対空射撃指揮用
二 型式 艦船装備ベクトル追尾式
三 使用波長 1.5m(周波数200MC)
四 本機の較正
3. 電源
電圧 3相交流 220V
電力 5KVA
周波数 50c/s又は60c/s
六. 操作人員 照射機員共 6名
管制機員 1名
灯 員 2名
電探員 2名
伝令員 1名
七. 能力
探信可能最大距離 40km
追尾可能最大距離 20km
追尾可能最小距離 1km
測距精度 100m
方向角測角精度 ±1°
高角測角精度(15°以上) ±1°
同上 (10°) ±3°
第二節 機器の概要
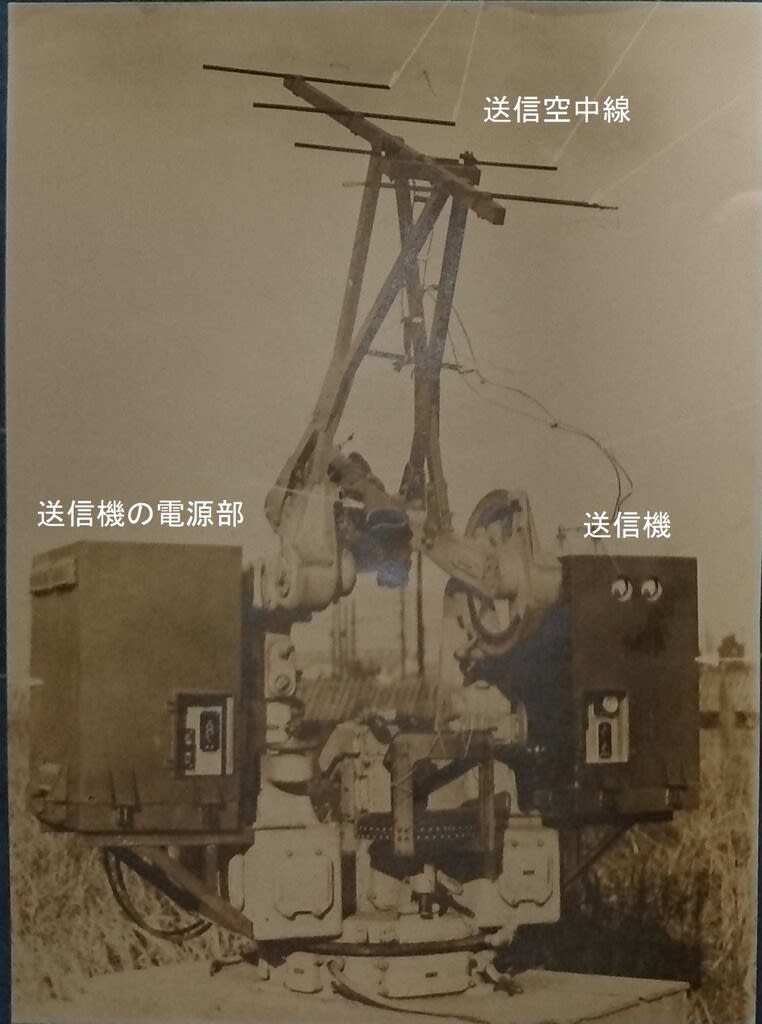
一. 送信機
重量 送信機 70kg
電源 120kg
発振方式 プッシュプル自励式
変調方式 格子変調方式
インパルス幅 3μs
インパルス同期 2,000c/s
二. 受信機
重量 受信機 34kg
電源 34kg
受信方式 超ヘテロダイン自動利得調整器付
全利得 約120db
中間周波数 20MC
局部発振周波数 180MC
周波数帯域 ±1.5MC
三. 選択機
重量 選択機 38kg
電源 60kg
方式 輝点追尾方式
選択可能距離範囲 1km乃至40km
四. 測距機
重量 45kg
方式 像移動基線合致式
測距可能範囲 0乃至22km
五. 指示機
重量 指示機 〇kg
電源 30kg
方式 等感度整流比較式
指示機 ベクトル式基準点表示方式
六. 同期発振機
重量 20kg
方式 マルチバイブレーター発振
インパルス周波数 2,000c/s
インパルス幅 約5μs
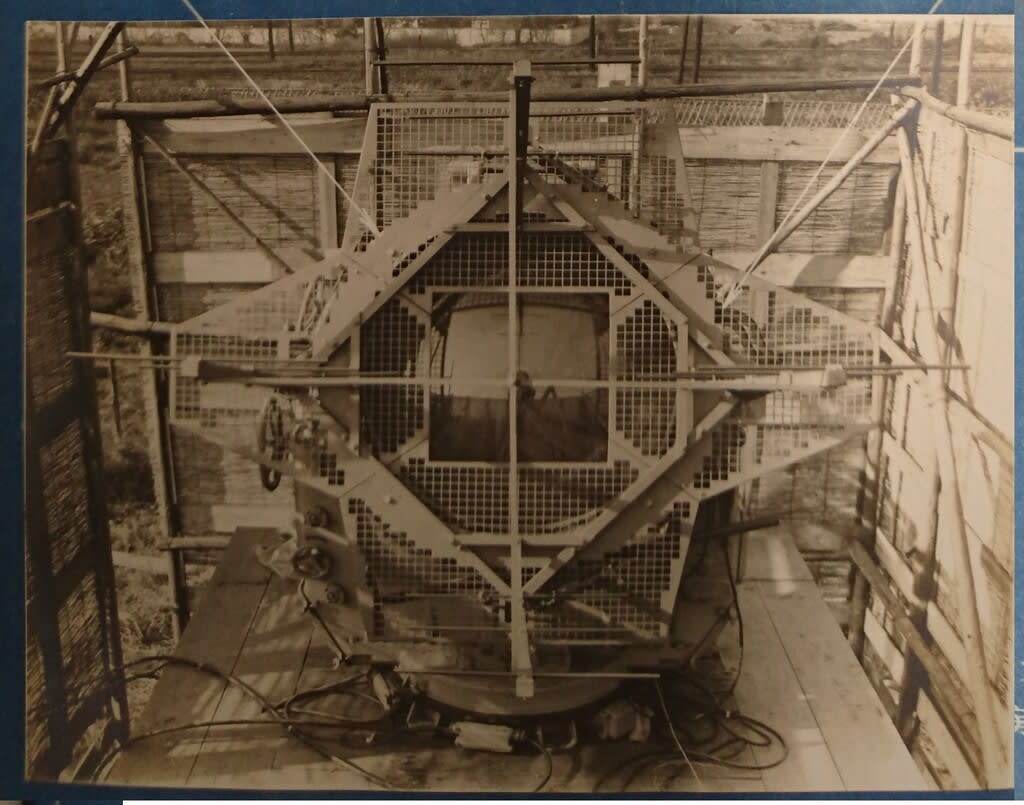
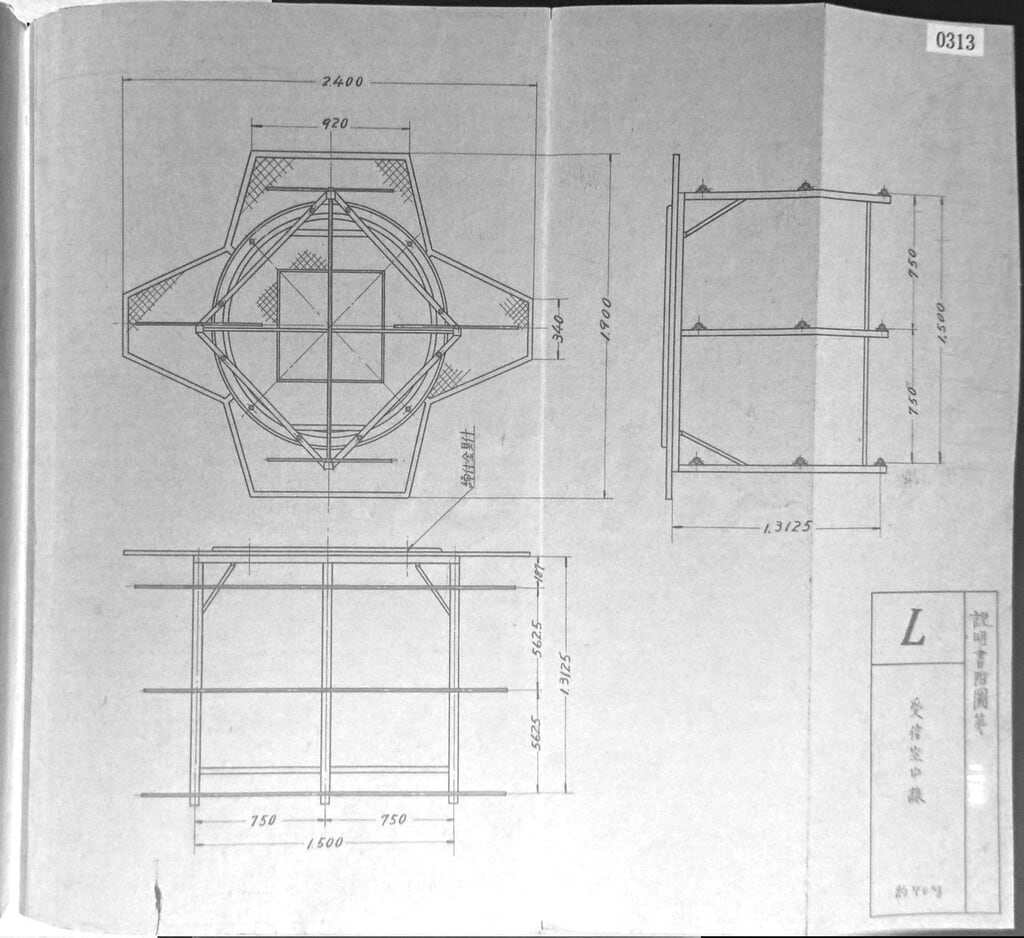
七. 空中線
(1)送信空中線
大きさ 2400×1900×1350
重量 70kg
構成 1段1列八木空中線(導波器2本、反射板附)4組
切換 位相切換
八. 位相環
重量 〇kg
切換法 空中線切換 容量式
選択出力切換 接点式
切換周波数 25c/s
第三章 原理
本機は「インパルス」を使用せる超短波探信儀の一つにして電気的に目標物の方向並びに高角及び距離を測定するものである。
目標物探知の一般原理は一號一型、一號二型、二號一型および二號二型等と同様なので之を省略し以下目標物の選択方、方向、高角の測定及び距離測定法について説明する。
第一節 目標選択法
本機に対する目標物が多数存在する場合は各々よりの反射波が同時に受信してしまう。 従って之等の反射波の中より追尾しようとすると目標の反射波を選択分離する必要がある。本機に於ては送信電波の「インパルス」同期に同期した位相可変の選択用「インパルス」信号を発生し選択管に加え選択用信号の存在する期間のみ作動する仕組みである。
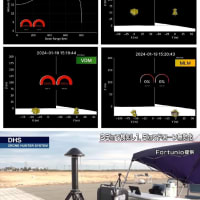
第二節 方向高角測定法
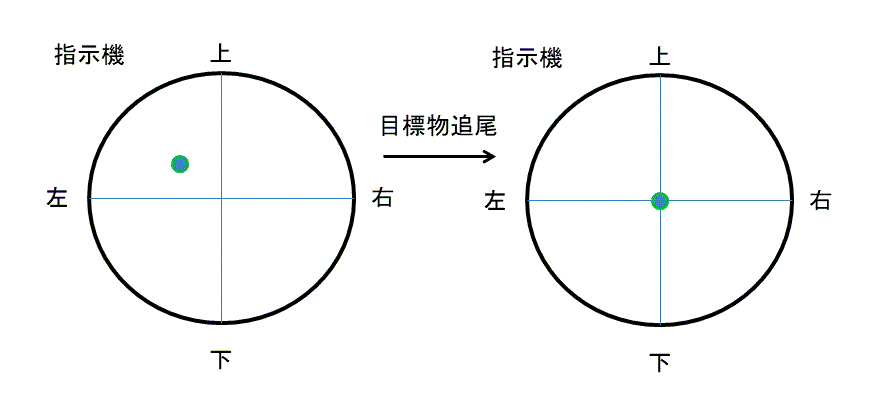
見張用電波探信儀のような最大感度法を使用する時は測角精度不十分であるため、本機には振幅比較方式を採用し精度は向上を計っている。即ち受信機空中線の指向特性を左右(又は上下)に振り両者は受信感度を比較し之が同一となるように追尾すると目標物は其の光点の方向に位置することになる。
受信感度の比較には前記選出出力を空中線と同時に切り替えへ指示用ブラウン管の偏向版に加え輝点を左右(又は上下)に移動させる。従って左右(又は上下)の受信感度同一になる場合は輝点は基準点に合致するが、一方が感度大なれば輝点はその方向に移動する。なお本機に於ては方向及び高度の指示に同一「ブラウン」管を使用することにより輝点は左右及び上下に同時に移動するような「ベクトル」指示として現れることになる。
第三節 距離測定法
見張用電波探信儀のような目盛方を使用する時は測距精度良好なることは期待できず、又距離の偏差も求めるのも困難となることから、像移動基線合致法を使用して、即ち測距には測距用「ブラウン」管面に基準線を装備して直接波の立ち上がりを之に合致するようにして電位差計式により波形を移動し反射波の立ち上がりが基線に合致するまでの移動量を計測することとする。
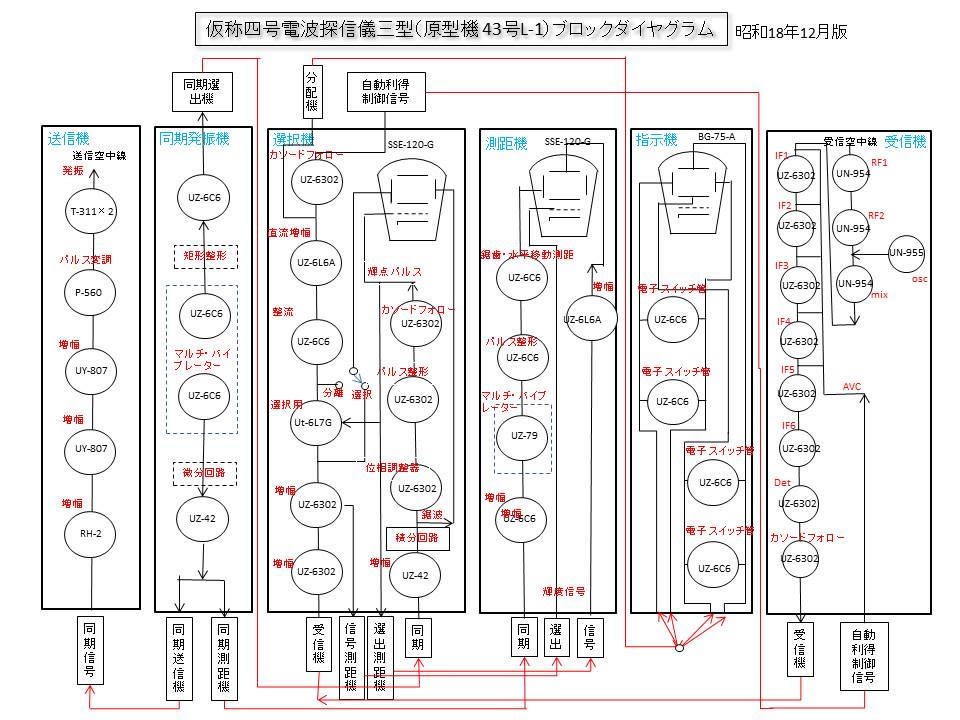
第四章 系統
第一節 送信
同期発振機により2,000c/sの「インパルス」信号を発生させて、之を送信機に装置し送信電波の輻射とする。
第二節 受信
目標に反射した電波は受信空中線より受信し位相環を通り受信機に入り低周波信号に変換され選択機に送られる。なお受信空中線の指向特性は位相環により上下左右に回転することは前述の通りである。
第三節 選択
選択機に於ては同期発振機より供給された同期信号により選択信号を発生し本機「ブラウン」管上の輝点指示に使用すると共に目標反射波の選択を行い選出した反射波は整流の上位相環付属の切換器に導く。
第四節 指示
位相環に於て切換えた低周波出力は指示機の「ブラウン」管に加えられる。指示機電源に於ては指示機「ブラウン」管の各種電源を供給すると共に指示機「ブラウン」管上の基準点指示を行う。
第五節 測距
同期発振機より送信「インパルス」に同期した矩形信号を供給し本機「ブラウン」管の偏向を行う、一方選択機より受信信号を受け「ブラウン」管の縦軸に加える。
第六節 電源
三相交流220V、5KVAの供給を受け各機器の電源とする。
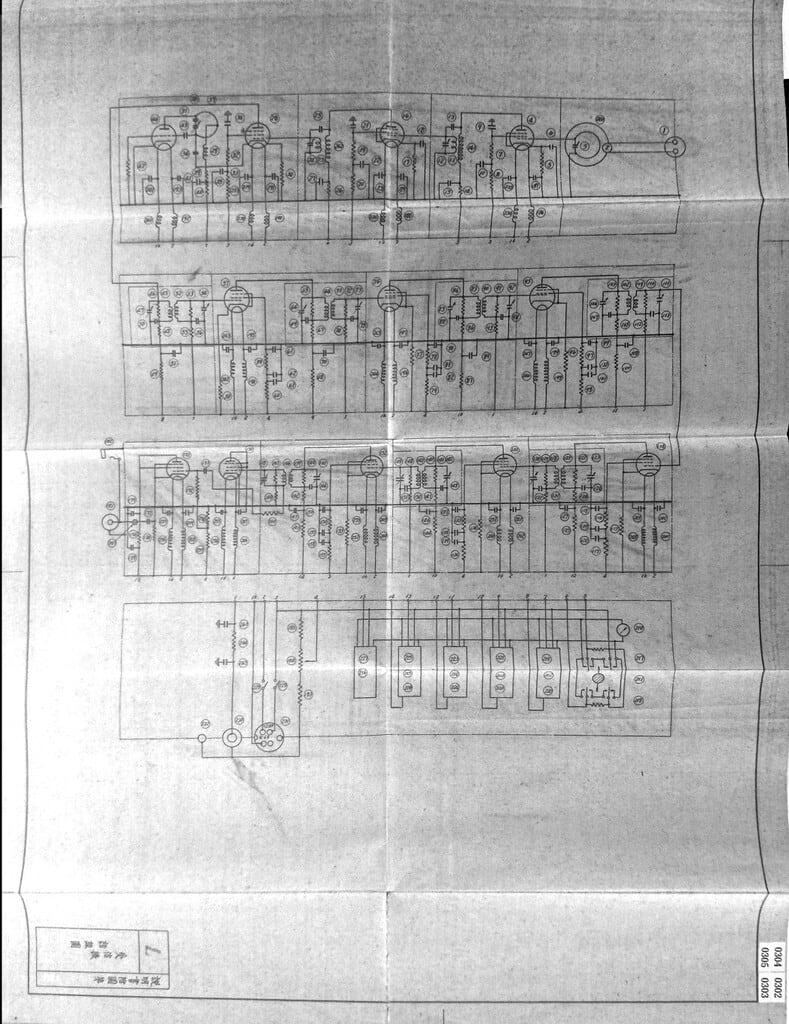
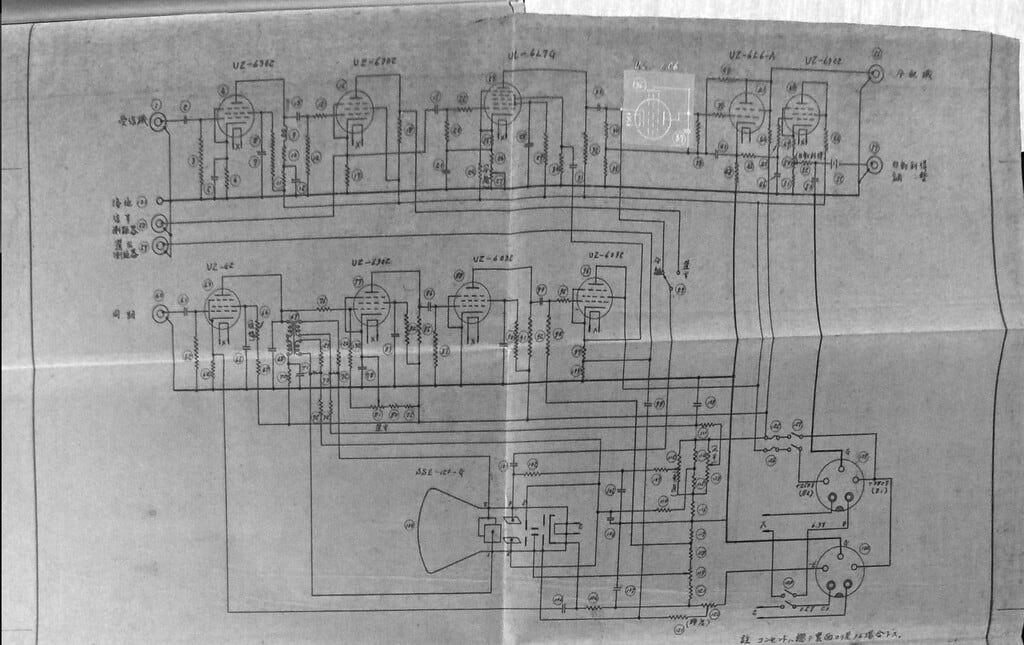
仮称四號電波探信儀三型の原型機(43号L-1)の全体のブロックダイヤグラムを以下に示す。
第五章 一般構造
第一節 電源部 省略
第二節 送信機
一. 概説 送信機は送信部及び電源部の二筐体よりなる。
何れも防滴覆を付属し次の諸部を収納する。
電源部
変調部
送信部
二. 入力及び出力
(1)入力
単相交流220V
本送信機の電源部は単相220V又は単相100Vにて使用可能になるように設計している。電源電圧の切換は端子板上に装置した“切替器”により切替えられる(上方に倒せば220V、下へ倒せば100V)附図第20参照
同期インパルス
(2)出力
発振出力
三.電源部 省略
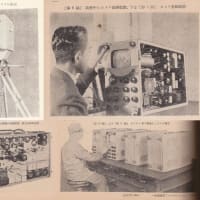
外観写真
回路図

補足説明
送信機は一般的な構成であり、特にコメントも必要ないが、初段増幅用の真空管に最新型のRH-2がここだけに1本のみ採用されている。
今回は試験的に採用したのだろうか。
このH管については、東京芝浦電気では、昭和18年(1943)頃から既に真空管「Hシリーズ」のメタル・ガラス管(M-G管)を陸海軍向けに開発して納入をしていました。この真空管「Hシリーズ」は、真空管自体の小型化と堅牢化を目的に、ステムにはバンタム・ステムを、ベースには8本ピンのオクタル・ベースを採用しており、寸法は全長が約80mm程度、最大直径が30mmφ程度の真空管でした。真空管の名称「H」は当時の研究所所長の濱田成徳氏のイニシャルから取ったものだと言われていました。
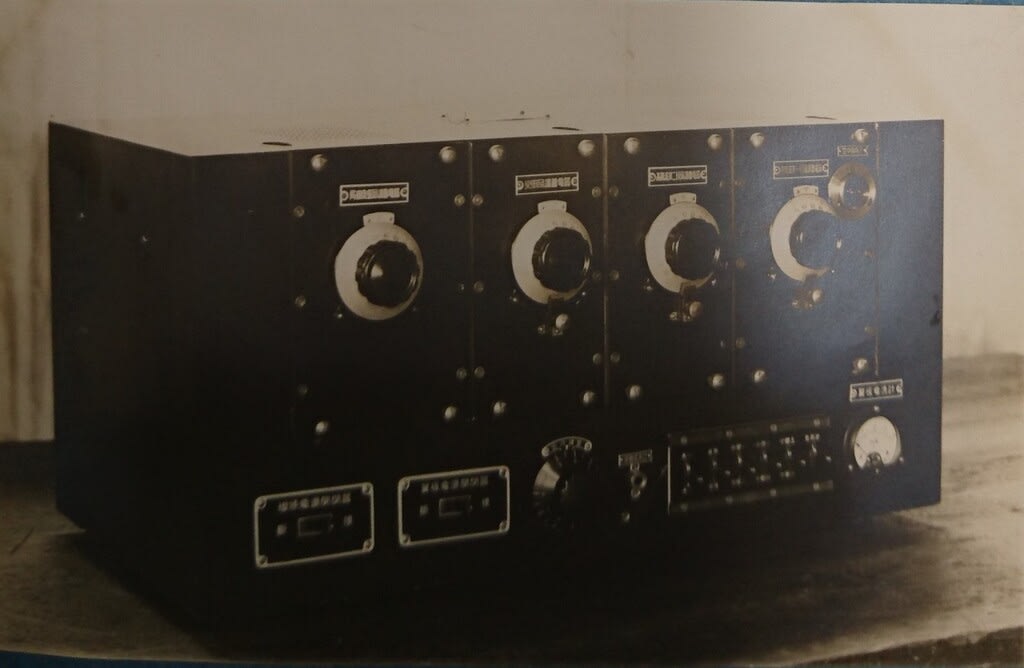
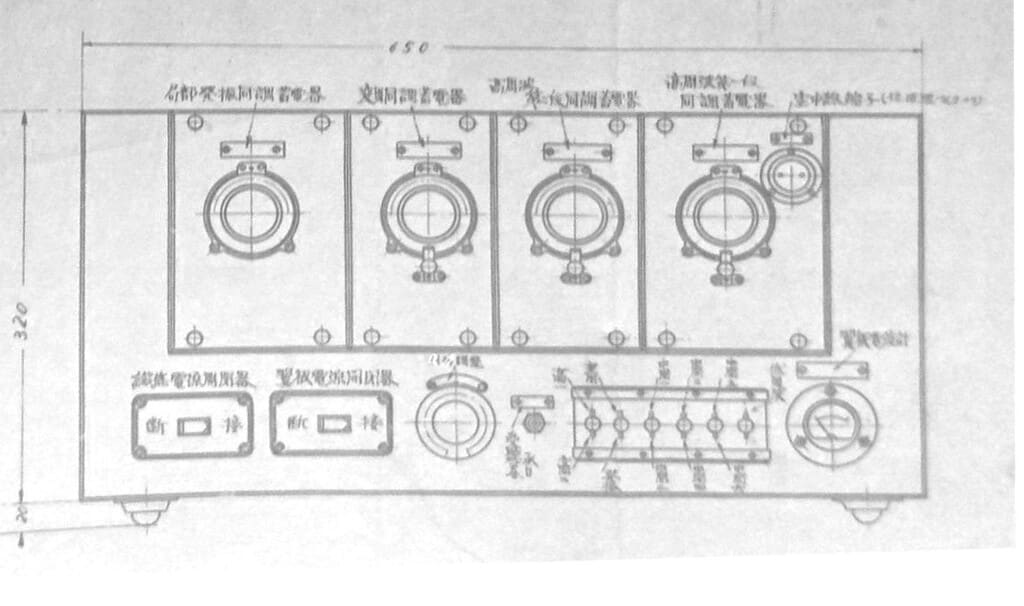
第三節 受信機
一. 概要
本受信機は方向及び高角用一個にして装置は受信部及び電源部の二筐体より構成されており、其の内容は下記に示す。
電源部
高周波増幅部
局部発振部
第一検波部
中間増幅部
第二検波部
結合増幅部
二.入力及び出力
(1)入力
空中線入力
自動利得制御信号
単相交流100V
(2)出力
受信出力
三. 電源部
交流100Vの供給を受け整流菅KX-523により直流電圧250Vを発生し各真空管の翼板電源及び遮蔽格子電源とする。別繊條電源変圧器を設け繊條電源6.3Vを供給する。
四. 高周波増幅部
空中線よりの入力信号は結合回路(260)、(2)を経て高周波増幅菅の格子に加えられる。高周波増幅は二段で、増幅菅は各段UN954を使用する。
五. 局部発振部
発振管にはUN955(44)を用い180Mc/sを発振し結合蓄電器(56)を経て、第一検波菅の陰極に加えられる。
六. 第一検波部
第一検波菅にはUN954(28)を用い本管の制御格子に加えた200Mc/sの受信信号と陰極抵抗(30)に加えた180Mc/sの局部発振信号とは本器により混合され20Mc/sの中間周波に変換される。
七. 中間周波増幅部
本中間周波増幅器は其の周波数帯域20Mc/s±1.5Mc/sとして各段共同調回路に抵抗(2kΩ)を挿入し所要の帯域を確保している。増幅段数は六段にして使用真空管は何れもUZ6302である。第一乃至第五増幅段の遮蔽格子回路に手動利得調整装置を設け、第一乃至第六増幅段の全般の格子回路には自動利得制御信号を加えている。本自動利得制御信号は選択機内で発生したもので、受信機は目標反射波を常に一定に保つように作動することになる。
八. 第二検波部
中間周波出力をUZ6302(170)により検波し低周波出力が得られる。検波回路には二極管検波を使用する。
九. 結合増幅部
第二検波器出力は負極性にしてUZ6302(173)の陰極結合増幅器により極性は負のまま“インピーダンス”を下げ選択機に送致する。
外観写真
図面
回路図
補足説明
受信機についても一般的な構成で、特筆するものはない。
ただし、自動利得制御回路を採用している機種は少ないが、採用の是非についてはメーカーの判断によるものかもしれない。
第四節 選択機
一. 概説
選択機は選択部と電源部とに分かれる。目標の選択には輝点追尾式をもいい次の各部より構成される。
電源部
受信信号増幅部
選択信号発生部
選択部
出力整流部
自動利得制御信号発生部
指示部
二. 入力及び出力
(1)入力
単相交流 100V
受信信号
同期信号
(2)出力
受信信号
選択信号
自動利得調整部
選出出力信号
三. 電源 省略
四. 受信信号増幅部
受信機よりの受信信号はUZ6302(4)(16)により二段増幅し陽極及び陰極より各々出力を取出す。陽極側よりの出力は選択機「ブラウン」管の縦軸の偏向を与え陰極側よりの出力は切換器(99)を経て選択機の制御格子に加える。
五. 選択信号発生部
同期発振機より矩形の同期信号を受けUZ42(63)の出力を鋸歯状波としてUZ6302(77)の格子特性により、この頭を切る。可変抵抗(81)は鋸歯状波の切る位置を変化する波状にして選択信号の位相調整用の抵抗となる。UZ6302(77)及び(88)により「インパルス」波に変形しUZ6302(96)の陰極側より選択信号を取出す。この選択信号は選択管の遮蔽格子に加えると共に一部は選択機の「ブラウン」管の制御格子に加え「ブラウン」管上に選択信号の位置を明示させる。
六. 選択部
選択管Ut6L7G(23)は制御格子に受信信号を遮蔽格子に選択信号を加え、選択信号の「インパルス」を加えた期間のみ、本真空管が作動する如くに陰極電圧を抵抗(27)により調整する。従って本器出力には選択した反射波の出力のみが得られる。
七. 出力整流部
選択管の出力は大きさの変化する「インパルス」の連続する波形となっているがUZ6C6(36)で整流し之の直流の変化に変換し、UZ6L6A(41)にて直流増幅し位相環に附属する分配機に送致する。
八. 自動利得制御信号発生部
前記整流出力は抵抗(45)及び蓄電器(46)よりなる時定数回路を経てUZ6302(48)により増幅し受信機の自動利得制御信号出力とする。
九. 指示部
真空管(63)の陽極に挿入した変圧器(69)により平衡型の鋸歯状出力を得て「ブラウン」管の横軸偏向に使用する。「ブラウン」管の各極電圧は電源装置より供給する。(-)500V及び(+)380Vを利用し、焦点調整、輝度調整及び位置調整等を行う。
外観写真

回路図
補足説明及び解説
説明書の第一節 構造及び能力の概要の中に、下記の記述がある。
七. 能力
探信可能最大距離 40km
追尾可能最大距離 20km
この前提条件には、パルス繰返し回数を如何に設定することが重要なファクターである。
本機には、パルス繰返し回数は2,000c/sが設定されている。
この2,000c/sの周波数の波長は150kmとなり、レーダー波は反射して戻った距離となるから、理論値な最大探針可能距離はその半分である75kmとなる。
実際の距離は、ブラウン管の表示上で帰線時間分(約15%程度)表示できないことや送信電力不足と受信機能力などを考慮し、本機の仕様では、実用的な探信可能最大距離を40kmと規定している。
それでは、追尾可能最大距離はその半分の20kmとしたのは何故なのであろうか。
勿論、探照灯の照射範囲の物理的制限があるのは理解できるが40kmとしてもいいのではないか。
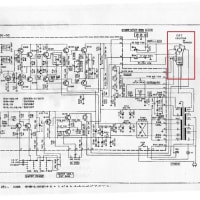
この疑問に本説明書での回答はないが、この選択機の回路の水平掃引用の鋸波の発生回路をみると、まず同期信号を発生させる同期発振機の出力は通常は2,000c/sの同期パルスを使用しているが、この選択機用の同期信号だけは、矩形波を選択機の同期信号としている。
水平軸掃引用の初段のUZ-42で図のように、この矩形波を積分回路を通し、2,000c/sの掃引用鋸波を生成する。
次段のUZ-6302ではグリッドバイアス電圧を、カットオフ点を越えた状態でかつ陰極側に可変抵抗器で電圧調整するようにし、プレート検波すれば整流するとともに、歪として鋸歯の頭がカットした状態の変形した矩形波ができる。
これを微分回路に通すと、位相を遅らせた輝点パルスを生成することができる。
このような巧みな回路設計により、見かけ上パルス繰返し回数を4,000c/sとした鋸波ができることになる。
選定機ではこのパルス繰返し回数を4,000c/sを利用するため、理論的な測距距離は37.5kmとなり、実用的な仕様として、追尾可能最大距離を20kmとして設定したことが分かる。
なお、位相調整器のみの機能であれば、ゴニオメーターやツーロン回路が使用されるが、本機では、パルス繰返し回数を意図的に倍にする機能を付加しているため特殊回路を考案したようだ。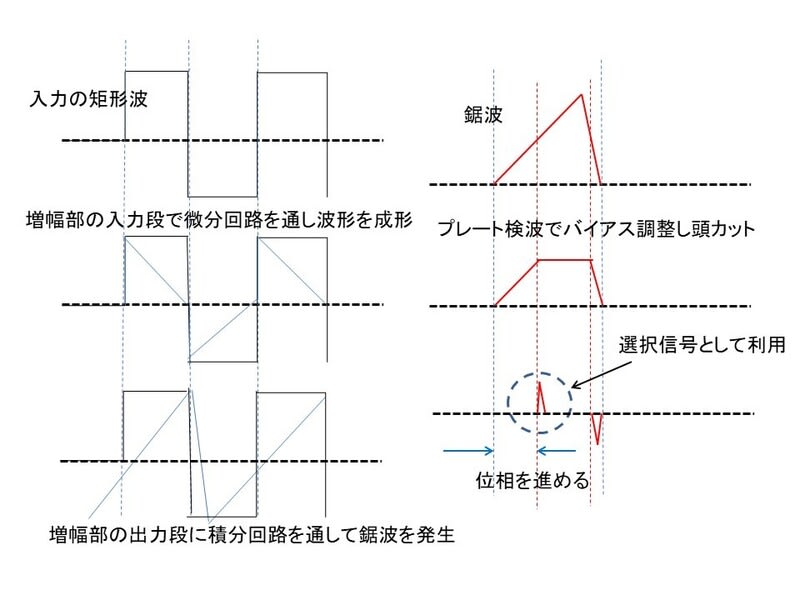
次に、縦軸の受信信号の表示用での特殊処理は選択部の項の説明書でも詳しく説明されているが、この背景を説明する。
この選択管には受信機の周波数混合部で通常使用されるUt-6L7Gの7極管を使用し、選択信号(輝度パルス)をゲート信号として受信信号をパルスと一致した時のみ通過させている。
選択機の操作パネルでは、ブラウン管表示用に分離と選択の切換SWがあるが、通常は選択にしておき、目標物を選択するが、分離にしたら選択パルス信号の通過した時の波形が現れるがその波形を拡大するなどの機能ではない。
何故このような選択部を設けたのかと言えば、選択信号パルス時間のみで通過した受信信号は探照灯の上下・左右の方向の管制をするための指示器の情報源となる。
この情報に自送信パルス波の直接波や目標物以外の反射波がかさなると指示機の表示は輝点表示が出来ないことになる。
このため、この選択部での不要波の除去は重要な意味を持っていることになる。
第五節 測距機
一. 概説 本機は電位差計式測距機にして仮称四式一型電波探信儀と同様影像を移動し反射波を基線に合致することにより測距するものであり全装置は一つの筐体よりなり次の諸部を含む。
電源部
矩形波電圧発生部
鋸歯状波発生部
受信信号増幅部
指示部
二. 入力及び出力
(1)入力
単相交流 100V
同期信号
選択信号
受信信号
(2)出力
無し
三. 電源部 省略
四. 矩形波電圧発生部 同期発振機より2,000c/sの「インパルス」電圧はUZ-6C6(59により増幅し之を夛(た、おおい)調波(高調波のこと)発振管UZ-79(14)に供給し矩形電圧を得る。
五. 鋸歯状波発生部 夛調波(高調波)発振管(14)の格子側抵抗(16)には矩形波電圧が発生し、これをUZ-6C6(27)の陽極側に鋸歯状電圧を作りブラウン管横振りように用いる。尚抵抗(29)に生じる矩形波電圧は帰線消去信号として利用する。
※夛調波(高調波)発振管とはマルチバイブレーターのこと
六. 受信信号増幅部 本機の受信信号入力はUZ-6L6A(56)により更に一段増幅し縦軸の偏向に使用する。
七. 指示部 「ブラウン」管にはSSE120-Gを使用し焦点調整、輝度調整及び上下左右の調整等を有することは一般ブラウン管波形観察器と同様である。
八. 測距抵抗 横軸偏向の反対側偏光板には電位差測定抵抗(43)(44)を経て直流電圧が加えられる。この抵抗の加減に依り像を左右に移動し測距を行い得る。
外観写真
回路図
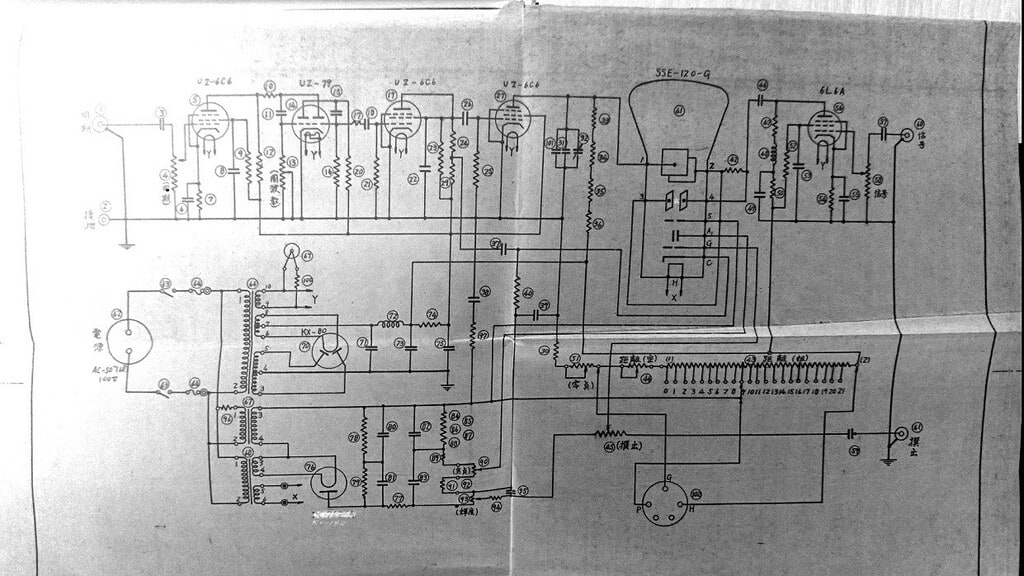
補足説明及び解説
同期信号は同期発振機から同期パルスを供給して、選択機と同様にマルチ・バイブレーターによる矩形波を作り、これを積分することで鋸歯を生成する。
説明書にある「抵抗(29)に生じる矩形波電圧は帰線消去信号として利用する。」から分かることは、選択機同様に見かけ上パルス繰返し回数を4,000c/sとした鋸波で水平軸の掃引を行っている。
したがって、探信可能最大距離は40kmとしつつも、測距機も最大距離は20kmということになる。
測距方法については、本来な位相調整器を使用してカーソルを移動するのが正攻法であるが、本機は説明書のとおり電位差測定法が採用されている。
この方法はとても簡単で通常のオシロスープではスポット調整するため、上下と左右の可変抵抗器を使用するが、この左右のスポット調整を逆に電位差を設けて像自体を左右に移動し、その移動量(電位差)を距離換算するという仕組みである。
基本的には、対の偏向板がどちらも零電位であれば、スポットは真ん中に位置することになる。
実際の回路図を見ると、まずブラウン管がシングルエンドとなっており、水平偏向版の一方は零電位となっている。
逆の偏向版に固定抵抗器と可変抵抗器があり、その中間に基本電源(ここでは制御用真空管のB電源)接続して置く。
可変抵抗器に今度はブラウン管の制御用の高圧電源を接続して可変抵抗器の端子はアースしておく。
この状態で可変抵抗器を調整し、基準電圧である基本電源(ここでは制御用真空管のB電源)と同一の電位となれば、零電位となり、スポットである輝点は真ん中に位置することになる。
この時の電位差を距離換算すればよく、具体的には1km換算の抵抗器×20個と切換用のロータリーSWと1km換算の可変抵抗器の2つからなり、零点調整した時の抵抗値をデジタル的に読み取ることが出来る。
ただし、この方法では測定精度には期待できないが、探照灯による目標物の距離測定程度であれば問題がないのかもしれない。
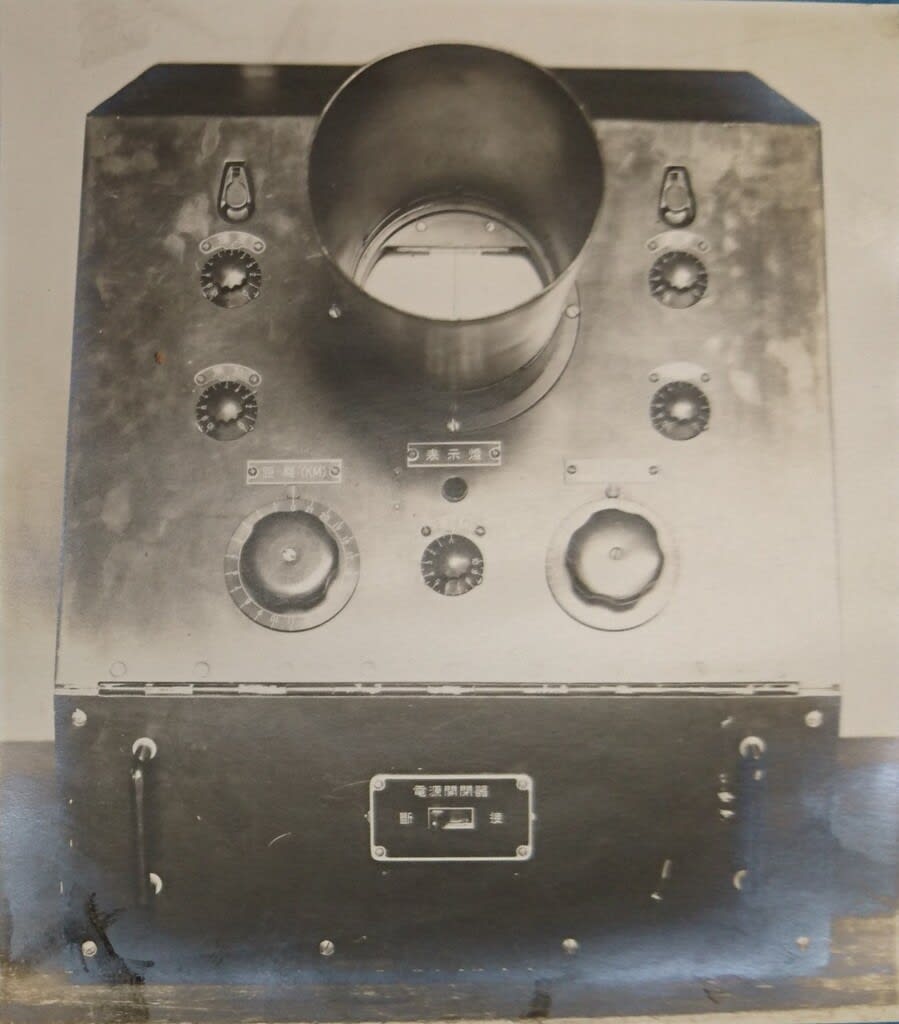
第六節 指示機
一. 概説 本機は特に探照灯用管制器に附いて旋廻及び俯仰の追尾を一人にて行う必要があることから等感度整流比較を用い且つベクトル式指示法を採用する。本器は指示器用ブラウン管部と其の他の装置との二筐体であり、つぎの諸部より構成される。
電源部
切換信号回路
基準点標示部
指示ブラウン管部
二. 入力及び出力
(1)入力
切換信号
単相交流 100V
(2)出力
無し
三. 電源部 省略
四. 切換信号回路
位相環にて切換を行う四出力は本機に送致され入力抵抗(9)(10)及び蓄電器(5)(6)等よりから、高い時定数回路に入り出力電圧が接点を離れてより次に接触するまで各一定に保持することができる。この電圧はブラウン管の左右上下の各偏向板に加え輝点を偏向する。
五. 基準点標示部
真空管(25)(26)(27)(28)は基準点標示用真空管にして何れもUZ-6C6を使用する。本真空管は格子に交流電圧が加えられ一秒間に50回づつ作動するようし、作動時の左右上下の偏向版を短絡させる。即ち(42)端子の11と12に加える電位差により「ブラウン」管の輝点が移動する場合を考えて偏向板短絡により一時輝点は原点に戻り基準点を標示する。
六. 指示「ブラウン」管部
本機は「ブラウン」管BG-75-A一個よりなり各電極電圧は指示機電源より供給される。
外観写真

回路図
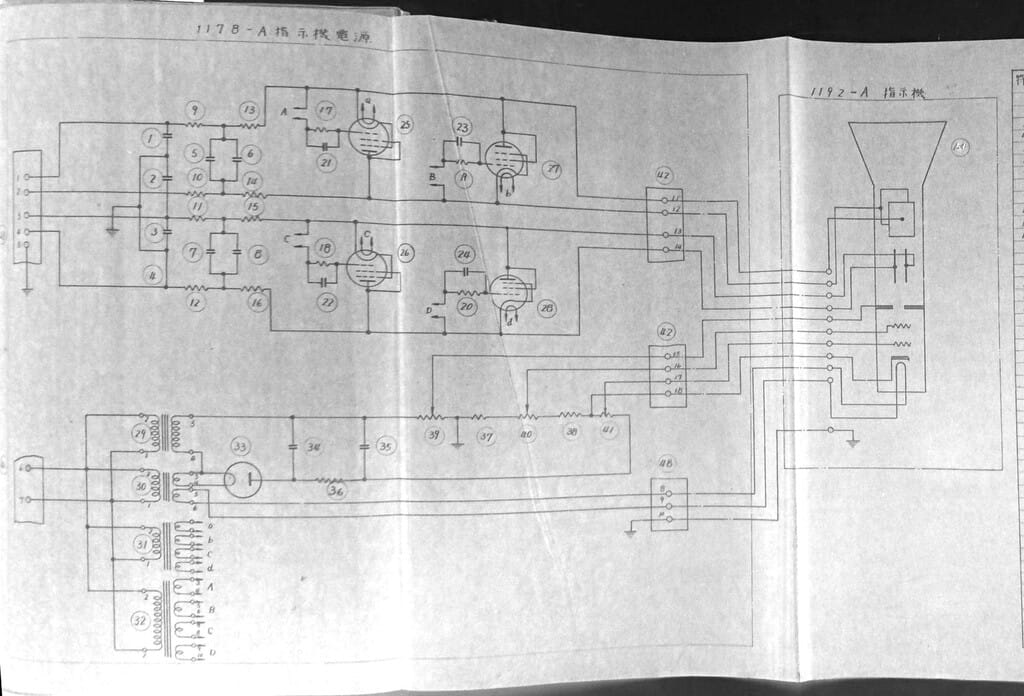
補足説明及び解説
本方式である位相環による受信信号の分配は、機械式スイッチングのため時間差が発生する。このため指示機に入る受信信号には遅延回路で補正する必要があり、本機では、1MΩの抵抗器と0.1μFのコンデンサーによる充電回路機能により、多少の信号の時間遅延を補正している。
なお、ブラウン管の水平、垂直の偏向版への信号の注入の処理方式を説明する。
2本の真空管を反転し、かつ並列に接続し、カソード・陽極には電圧を加えてない。
ようは最初の段階では、カソードとプレートとも電位差は0ということである。
この目的は、真空管を信号増幅用としてではなく、電子スイッチとして機能するような回路設計のためである。
このため、高圧の交流をトランスで生成し、両真空管のグリッドに接続し、交流が‘+’の時、カソードとグリッド間は2極管として動作し、カソードとグリットは短絡することになり受信信号は消滅し、偏向版は0電位となる。
勿論陽極側は0電位であるので陽極側への信号は阻止される。
同時に、隣の逆向きに接続された真空管でのグリッドには、交流が‘-’に印加されるので、真空管は電子スイッチとして機能せず、ブラウン管の該当の偏向版へ信号を注入することになる。
このように、この交流信号の+と-により真空管は交互に電子スイッチして機能することで該当のブラウン管の該当の偏向版に信号を正確に注入するこことなる。
なお、無信号の時には、熱雑音の信号を表示することから、実際の波形は中央で焦点ボケをおこしたような表示となり、無信号の判定にも利用できる。
実際のこの表示器の入力インターフェースは以下のとおりと推定される。
入力端子1には、右アンテナの受信機出力
入力端子2には、左アンテナの受信機出力
入力端子3には、上アンテナの受信機出力
入力端子4には、下アンテナの受信機出力
大変考えられた回路設計に、唯々、感心するばかりであるが、「ニューマン文書のSLC理論」の説明書にある方位角と仰角制御装置(表示機)の項の内容をそのまま具現化した指示機に見受けられるのは、それは単なる偶然なのか。
ニューマン文書のSLCの理論 https://drive.google.com/file/d/1IpiUw8ymUL2mBdYaVKpKOf1PalZSBfo2/view
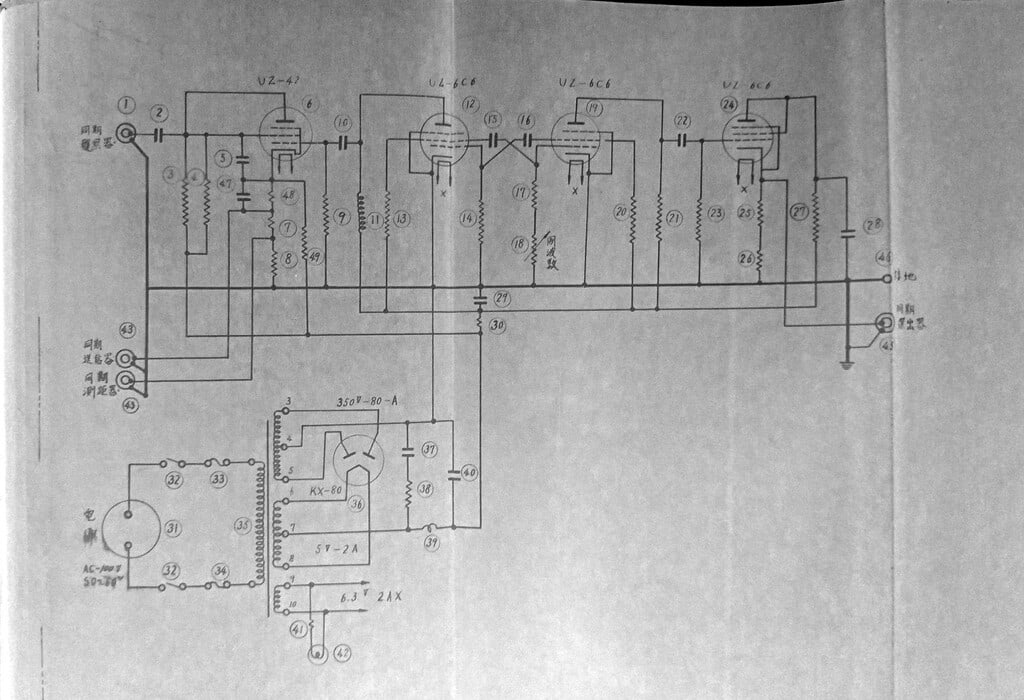
第七節 同期発振機
一. 概説 本機は夛調波(高調波)発振回路を用いた同期発振機にして次の各部から構成される。
二. 入力及び出力
電源部
夛調波(高調波)発振部
インパルス発生部
矩形波発生部
二. 入力及び出力
(1)入力
単相交流 100V
(2)出力
送信機同期信号
測距機同期信号
選択機同期信号
三. 電源部 省略
四. 夛調波(高調波)発振部 真空管(12)及び(19)は夛調波(高調波)発振管にしてUZ-6C6を用いる。周波数調整は抵抗(18)に於て行い2,000c/sに調整する。
五. インパルス発生部 夛調管の一方の陽極側の塞流線輪(9)には「インパルス」波を生じる。UZ-6C6(6)により増幅して送信機及び測距機の同期信号に使用する。
六. 矩形波発生部 夛調管の一方の陽極には抵抗(21)を挿入して矩形波を発生させる。此の信号はUZ-6C6にて増幅し選択機の同期に用いる。
外観写真
回路図
第八節 空中線
一. 概説 本機の空中線の送信用及び受信用の二組よりなり送信用は探照灯管制器に、受信用は探照灯前面に取付ける。
二. 入力及び出力
(1)入力
送信出力
(2)出力
受信信号
三. 送信空中線 送信空中線は半波タイポールの導波器二本及び反射器一本を取付けた八木空中線にして空中線素子の中央を切り離し長さ1/4波長の平行線よりなる整合器を取付けて平行線の適当なる点より二線式饋電線を使用して送信機に接続する。
四. 受信空中線 受信空中線は左右上下の四組よりなり左右上下の空中線は夫々一波長の間隔を有している。
角空中線の構成は反射器に四組共用の金網を使用する以外は送信空中線と同一である。
饋電線は空中線中央より少し離れた点を選び高周波「ケーブル」よりなる長さ1/4波長の整合器を使用する。整合器出力は同心管よりなる外套管に加え非平衡出力変換し高周波同心ケーブルにより位相環に送致する。
外観写真
図面
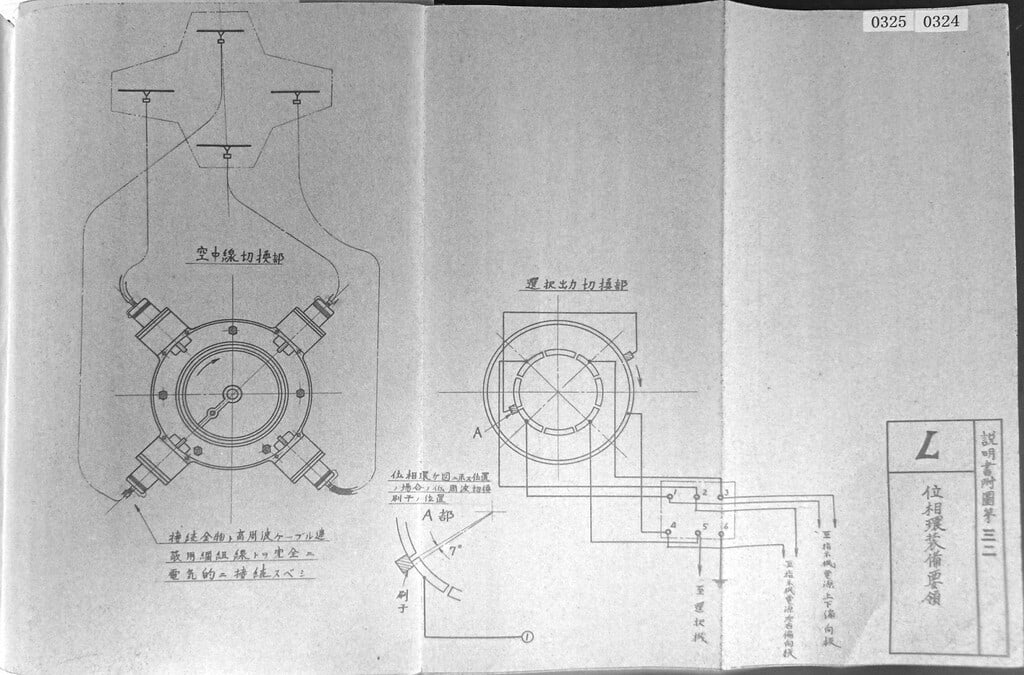
第九節 位相環
一. 概説 四組の受信空中線よりの信号は位相環に加えられる。
位相環に於ては受信空中線指向特性を中心軸に対して一定角度を保持して回転する。又本機回転軸には選択出力切替器を連結し空中線切換器と同時に切り替えを行う。
本機は次の三部より構成されている。
空中線切換部
選択出力切換部
電動機
二. 入力及び出力
受信信号
切換信号
三. 空中線切換部
切替器内部には直径14cmの環がある。上下左右の四点に夫々空中線を接続する。この環の内側に更に之と密接して同軸の回転する環がある。この一点より出力は中心に装置し電動機と反対側の側面より取出す。斯(か)くの如く切換に容量式を採用するのは接点より生じる雑音を防止する為である。
四. 選択出力切換部
選択出力の切換には刷子を使用する。切替接点は円周を八等分にした金属より構成する。この上を刷子が回転し出力は八接点の内一つ置きの四接点より取出す。
※刷子とは、ブラシのこと
五. 電動機
前記両切換部の回転用として、次の如き電動機を使用する。
電圧 220V(当分は100V)
馬力 1/25
極数 4
回転数 1500
図面
本機に使用した真空管の紹介
送信機用

受信機用高周波増幅菅(エーコン管)

受信機、選択機、測距機、同期発振器機に使用したST管の事例

選択機、測距機、指示機のブラウン管

四號電波探信儀三型改二(43号 L-3)について
四號電波探信儀三型の最終バージョンのブロックダイヤグラムを下記に示す。
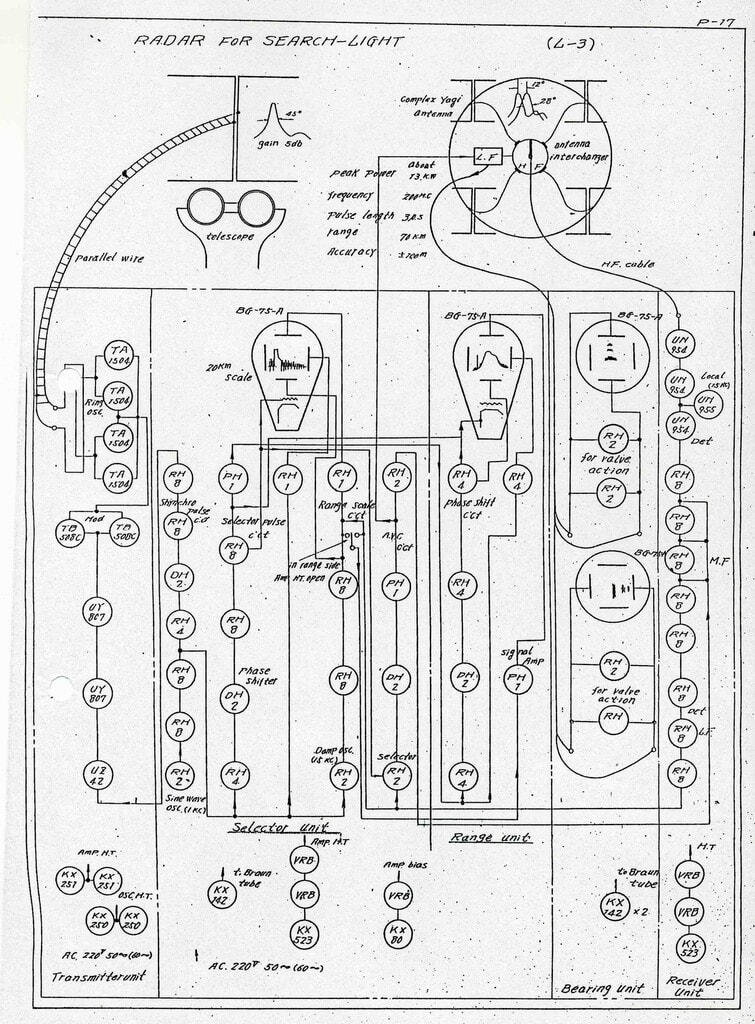
資料はこのブロックダイヤグラムで、初期バージョンの仮称四號電波探信儀三型(43号 L-1)と比較して如何に性能改善を図ったのか検証する。
なお、以下の参考資料を示す。
「元軍令部通信課長の回想」昭和56年 鮫島素直
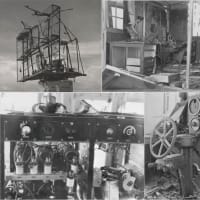
(四号電探三型)
その一号機は昭和十八年八月戦艦山城に装備し、艦船用としの実用実験を行ったが、艦の動揺および変針によって、追尾が甚だしく乱調となるなど、種々解決を要する問題が多いことが指摘された。
一方、対水上射撃用電探が立ち遅れていたため、艦船部隊の夜間戦斗はむしろ回避される傾向にあったので、この種電探に対する要望も次第に薄らいできた。
このような情況で、この型の電探も陸上用に転用されることになり、装着対象となる探照灯も一二〇センチメートルのものから、一五〇センチメートルのものに改め、アンテナも大型化し、測距装置などの改良を加えて、四号電探三型改一が試作された。
次いで送信電力を二倍に増大し、精密測距装置を付加して、四号電探三型改二が完成された。
改二の性能は照射用としては十分なものであり、照射実験においても殆んど照射毎に目標を捕捉しうる程度に改善されていた。
この型の電探は改一、改二を合わせて、計二五〇基製造された。
補足説明及び解説
この2点の資料から、まず送信機の真空管がT-311のプッシュプルから送信菅TA-1504の4本を使用したリング発振にパワーアップしている。
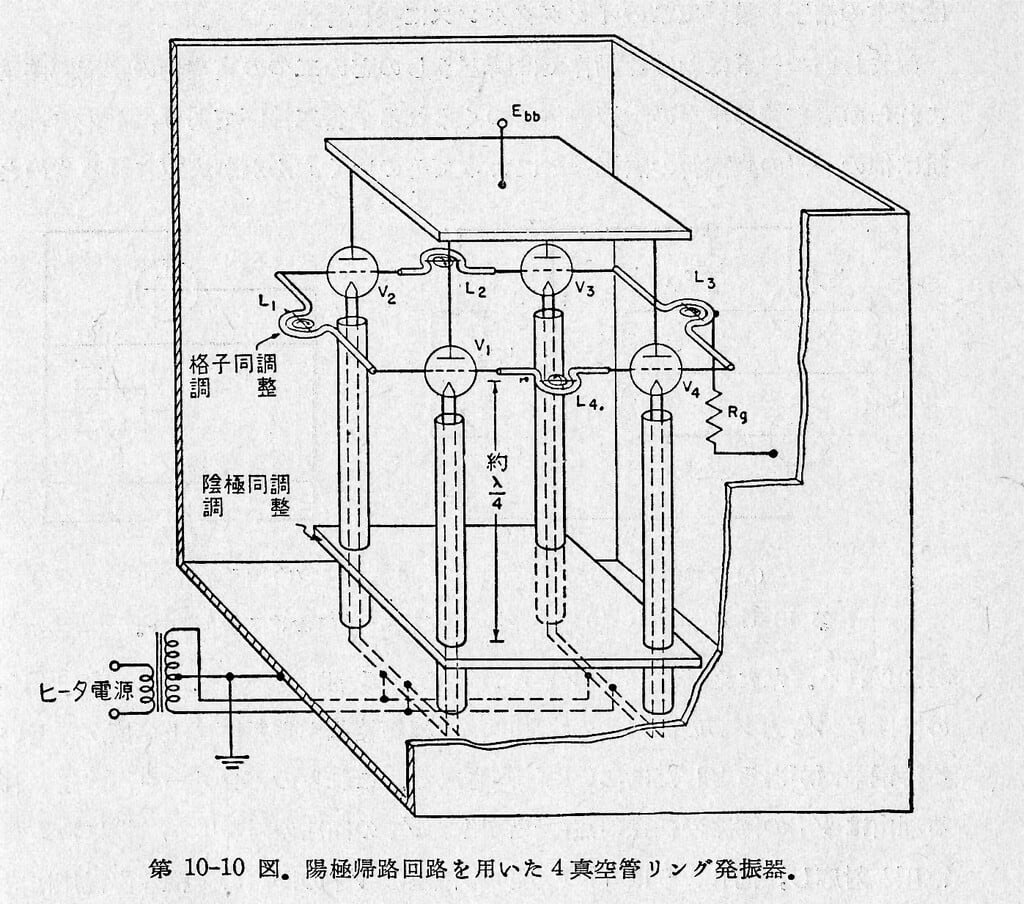
更に、使用真空管がST管からH管に全面変更されている。

同期発振機も、使用真空管が4本から7本に増えており、同期信号のための発振方式もマルチバイブレーター方式から正弦波発振方式に変更になっており、パルス繰返し回数も1,000c/sに下げられている。
指示機のブラウン管も上下と左右に2本に分けられており、方位角と高角の調整を2人で対応するように変更したようだ。
「元軍令部通信課長の回想」の中で「送信電力を二倍に増大し、精密測距装置を付加して、四号電探三型改二が完成された」とあるように、原型機の簡易測距機から精密測距機に作り替えられているようだが、ブロックダイヤグラムを見るかぎりでは原型機と変わらないように思われる。
なお、ブラウン管は大型の120mmのものは廃止され、全て75mmの小型のブラウン管に変更されているが、少し観測には不便を生じるだろう。
参考文献
仮称4号電波探信儀3型 取扱説明書 ⑥兵器 475 防衛省戦史資料室
Reports of the U.S. Naval Technical Mission to Japan, 1945-1946
「日本無線史」10巻 1951年 電波管理委員会
「元軍令部通信課長の回想」昭和56年 鮫島素直
機密兵器の全貌 昭和51年6月 原書房
「ケンさんのホームページ」 真空管「Hシリーズ」 http://kawoyama.la.coocan.jp/tubestoryhsiries.htm