/*
PS3BT_arduino_NANO_tank_TB6612_FIRE_IR_D5RB
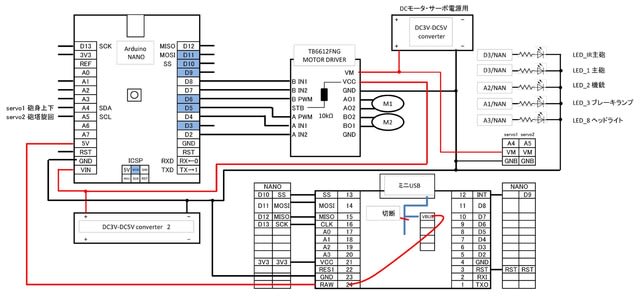
モータドライバはTB6612
A4ピンでサーボモータ(砲身上下)を動かす
A5ピンでサーボモータ(砲塔旋回)を動かす 連続回転改造サーボ
砲撃時のリコイルアクション
A1,A2,A3ピンでLED点灯
irremote PIN3 赤外線発光(砲撃)システム
A0ピンに赤外線受光モジュール出力を接続し、被弾処理を追加
最大30720バイトのフラッシュメモリのうち、スケッチが26886バイト(87%)を使っています。
最大2048バイトのRAMのうち、グローバル変数が1342バイト(65%)を使っていて、ローカル変数で706バイト使うことができます。
PWM速度制御していなかったのを訂正。 後進系は1/2速度
*/
#include <PS3BT.h>
#include <usbhub.h>
#ifdef dobogusinclude
#include <spi4teensy3.h>
#endif
//#include <Usb.h> // needed by Arduino IDE
USB Usb;
BTD Btd(&Usb);
PS3BT PS3(&Btd);
//PS3BT PS3(&Btd, 0x00, 0x1B, 0xDC, 0xF2, 0x54, 0x32); //for Dongke A
/*シリアルモニタにBluetooth DongleのアドレスがSerial.printされる。
書き出された6個のコードをスケッチを変更し、
ドングルを指した状態でArduinoに書き込む(電源は切らない)
ドングルを抜いてUSBケーブルでPS3コントローラを接続する(電源は切らない)
ケーブルを抜いてドングルを指し直す(Arduinoを再起動する)
PS3コントローラのPS ボタンを押してペアリングする。
*/
#include <IRremote.h>
IRsend irsend;
int RECV_PIN = A0 ; //赤外線受光部をPIN A0に
IRrecv irrecv(RECV_PIN);
decode_results results; //受信信号を格納する
const long sign_hit = 0x4CB0FADD;
int cnt = 0 ;
//#include <Servo.h>
//Servo myservo;
#include <VarSpeedServo.h>
VarSpeedServo myservo;
VarSpeedServo myservo_1;
int servo_pos = 90;
const int servo_sp = 50;
const int servo1_sp = 50;
const int d_time = 20;
int ch = 0;
int val = 0;
int pos_y;
int pos_x;
int pos_ry;
int pos_rx;
int PWMA = 5; // Aモータ PWM 左側モータ
int AIN1 = 4; // Aモータ IN1 ( 9ピンはUSBホストシールド使用
int AIN2 = 2; // Aモータ IN2
int BIN1 = 8; // Bモータ IN1
int BIN2 = 7; // Bモータ IN2
int PWMB = 6; // Bモータ PWM 右側モータ( 10ピンはUSBホストシールド使用
int motor_speed;
//int motor_sp; //モータスピード max=255
//const int LED_1 = A1; //主砲 D3にLED_IRとパラ接続
const int LED_2 = A2; //機銃
const int LED_3 = A1 ; //ブレーキランプ
//const int LED_4 = ; //主砲準備中
const int LED_8 = A3; //ヘッドランプ
const int SVCH1 = A4; //servo 1
const int SVCH2 = A5; //servo 2
void setup() {
irrecv.enableIRIn(); // Start the receiver
pinMode(RECV_PIN, INPUT) ; // 赤外線受信モジュールに接続ピンをデジタル入力に設定
pinMode(PWMA, OUTPUT);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
// pinMode(LED_1, OUTPUT);
pinMode(LED_2, OUTPUT);
pinMode(LED_3, OUTPUT);
// pinMode(LED_4, OUTPUT);
pinMode(LED_8, OUTPUT);
pinMode(SVCH1, OUTPUT);
pinMode(SVCH2, OUTPUT);
myservo.attach(SVCH1); //servo1 砲身上下
myservo.write(servo_pos);
myservo_1.attach(SVCH2); //servo2 砲塔旋回
myservo_1.write(servo_pos);
Serial.begin(115200);
while (!Serial); // Wait for serial port to connect - used on Leonardo, Teensy and other boards with built-in USB CDC serial connection
if (Usb.Init() == -1) {
Serial.print(F("\r\nOSC did not start"));
while (1); //halt
}
Serial.print(F("\r\nPS3 Bluetooth Library Started"));
}
void loop() {
Usb.Task();
if (irrecv.decode(&results)) { // 受信コードの値が
if (results.value == sign_hit) { // 0x4CB0FADDだったら被弾
Serial.println("HIT!");
Hit();
}
irrecv.resume();
}
if (PS3.PS3Connected) {
//スティックの中央は127だけどピタリと止まらないので+-10ほど余裕を持たせる。
//左スティック上下の値(最上部0、中央127、最下部255)を読み込む
pos_y = PS3.getAnalogHat(LeftHatY);
pos_x = PS3.getAnalogHat(LeftHatX);
pos_ry = PS3.getAnalogHat(RightHatY);
pos_rx = PS3.getAnalogHat(RightHatX);
/*
砲身 UP/DOWN
スティックが下(20未満)の時は1ずつ下に動く。
スティックが上(235より上)の時1ずつ上に動く。
スティックを中間に戻すと、サーボはその位置で停止。
ボタン(SQUARE)を押すと90°にセット。
*/
if (pos_ry > 235 && servo_pos < 179 ) { // UP
servo_pos++;
myservo.write(servo_pos, servo_sp, true);
} else if (pos_ry < 20 && servo_pos > 1 ) { //DOWN
servo_pos--;
myservo.write(servo_pos, servo_sp, true);
} else if (PS3.getButtonClick(SQUARE)) { //90°
servo_pos = 90;
myservo.write(servo_pos, servo_sp, true);
// delay(d_time);
}
//砲塔旋回
if (pos_rx > 235) { //右旋回
myservo_1.write(0, servo1_sp);
} else if (pos_rx < 20) { //左旋回
myservo_1.write(180, servo1_sp);
} else { //停止
myservo_1.write(90, servo1_sp);
}
//delay(d_time);
//砲撃 + リコイル
if (PS3.getButtonClick(R1) && ch == 0 ) {
int khz = 38; // 38kHz carrier frequency for the NEC protocol
unsigned int irSignal[] = {4100, 1000, 2000, 2050, 1000}; // vs BATTLE TANK jr T-72 40MHz
// AnalysIR Batch Export (IRremote) - RAW
irsend.sendRaw(irSignal, sizeof(irSignal) / sizeof(irSignal[0]), khz);
irrecv.enableIRIn(); // 受信を再開する
//digitalWrite(LED_1, HIGH);
motor_run(255, 0, 1, 0, 1, 1);
ch = 20000; //約5秒間は砲撃不可
delay(70);
motor_run(0, 0, 0, 0, 0, 1);
delay(20);
//digitalWrite(LED_1, LOW);
motor_run(255, 1, 0, 1, 0, 1);
delay(130);
} else {
if (ch > 0) {
ch--;
// digitalWrite(LED_4, HIGH); //装填中
} else {
// digitalWrite(LED_4, LOW); //砲撃可
}
}
//銃撃
if ( PS3.getButtonClick(L1)) {
for ( int i = 0; i < 5 ; i++) {
val++;
digitalWrite(LED_2, HIGH);
delay(50);
digitalWrite(LED_2, LOW);
delay(50);
}
}
//ヘッドライト
if (PS3.getButtonClick(RIGHT)) { //点灯
digitalWrite(LED_8, HIGH);
}
if (PS3.getButtonClick(LEFT)) { //消灯
digitalWrite(LED_8, LOW);
}
//左スティックがセンター付近は停止(ブレーキ)
if (pos_x >= 117 && pos_x <= 137 && pos_y >= 117 && pos_y <= 137) {
motor_run(0, 1, 1, 1, 1, 1);
}
//前進
else if (pos_y < 117 && pos_x > 117 && pos_x < 137) {
//左スティック中央(127)から最上部(0)の値をモーターのスピード0から255に変換
motor_speed = map(pos_y, 117, 0, 0, 255);
motor_run(motor_speed, 1, 0, 1, 0, 0);
}
//後進
else if ( pos_y > 137 && pos_x > 117 && pos_x < 137) {
motor_speed = map(pos_y, 137, 255, 0, 255);
motor_speed = motor_speed / 2;
motor_run(motor_speed, 0, 1, 0, 1, 0);
}
//前進右旋回
else if ( pos_y < 117 && pos_x > 137) {
motor_speed = map(pos_y, 117, 0, 0, 255);
//motor_speed = motor_speed / 2;
motor_run(motor_speed, 1, 0, 0, 0, 0);
}
//前進左旋回
else if ( pos_y < 117 && pos_x < 117) {
motor_speed = map(pos_y, 117, 0, 0, 255);
//motor_speed = motor_speed / 2;
motor_run(motor_speed, 0, 0, 1, 0, 0);
}
//後進右旋回
else if ( pos_y > 137 && pos_x > 137) {
motor_speed = map(pos_y, 137, 255, 0, 255);
motor_speed = motor_speed / 2;
motor_run(motor_speed, 0, 1, 0, 0, 0);
}
//後進左旋回
else if ( pos_y > 137 && pos_x < 117) {
motor_speed = map(pos_y, 137, 255, 0, 255);
motor_speed = motor_speed / 2;
motor_run(motor_speed, 0, 0, 0, 1, 0);
}
//右超信地旋回
else if ( pos_y > 117 && pos_y < 137 && pos_x > 137) {
motor_speed = map(pos_x, 137, 255, 0, 255);
motor_speed = motor_speed / 2;
motor_run(motor_speed, 1, 0, 0, 1, 0);
}
//左超信地旋回
else if ( pos_y > 117 && pos_y < 137 && pos_x < 117) {
motor_speed = map(pos_x, 117, 0, 0, 255);
motor_speed = motor_speed / 2;
motor_run(motor_speed, 0, 1, 1, 0, 0);
}
}
}
void motor_run(int D0, int D1, int D2, int D3, int D4, int D5) {
/* D0 : モータスピード
D1 : モータA(左)CH1 , D2 : モータA(左)CH2 1 = HIGH / 0 = LOW
D3 : モータB(右)CH1 , D4 : モータB(右)CH2 1 = HIGH / 0 = LOW
D5 : LED_3 ON/OFF 1 = HIGH / 0 = LOW
*/
analogWrite(PWMA, D0);
analogWrite(PWMB, D0);
digitalWrite(AIN1, D1);
digitalWrite(AIN2, D2);
digitalWrite(BIN1, D3);
digitalWrite(BIN2, D4);
digitalWrite(LED_3, D5);
}
// ====被弾====
void Hit() {
motor_run(255, 0, 1, 0, 1, 0);
delay(100);
motor_run(0, 1, 1, 1, 1, 1);
delay(50);
motor_run(160, 1, 0, 1, 0, 0);
delay(80);
motor_run(0, 1, 1, 1, 1, 1);
delay(50);
cnt++;
if ( cnt >= 5 ) {
motor_run(0, 1, 1, 1, 1, 0);
delay(10000);
cnt = 0;
} else {
delay(1000);
}
} |