2023-04-27
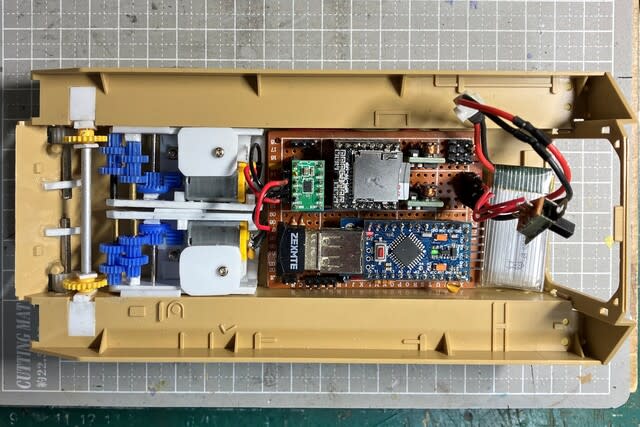
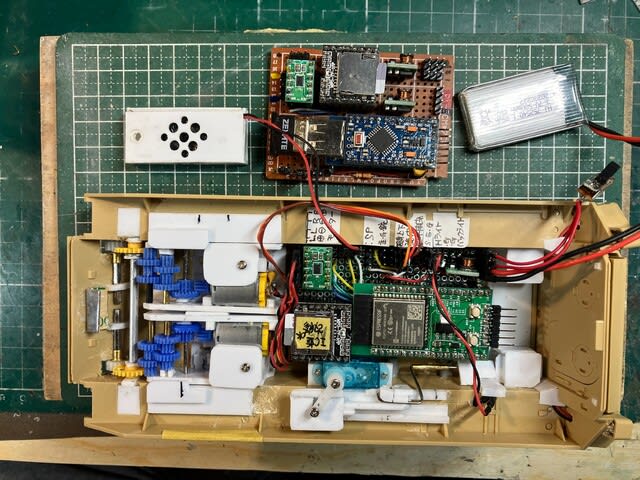
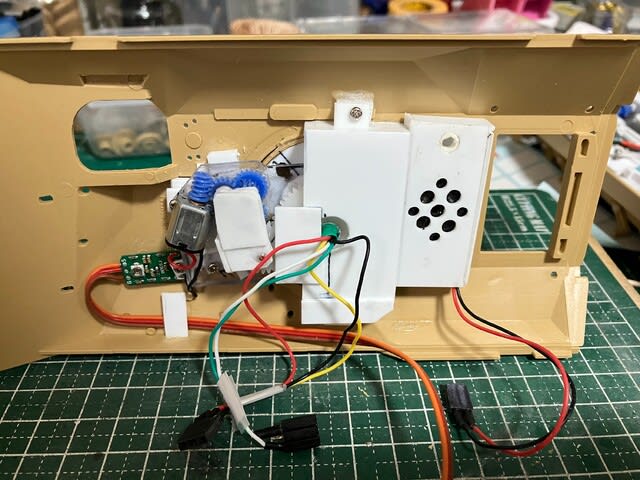
備忘録として、完成したM2A2ブラッドレーの回路図とプログラムを残します。
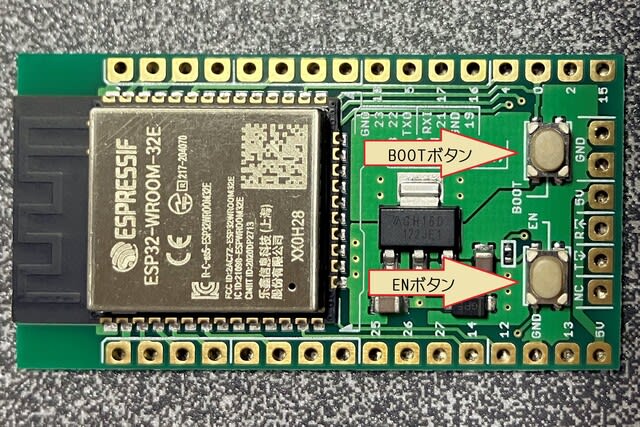
尚、ESP32-WROOM-32E-MINIとモータドライバDRV8835は秋月電子通商で購入しました。
▼回路図
画像をクリックすると拡大します

- 2023-04-18
- 効果音はDFPlayer Mini
- モータドライバはDRX8835
- 【操作手順】
- PSボタンでペアリング開始。白色インジケータランプ高速点滅。
- 戦車の電源投入。
- インジケータランプ青色点灯でペアリング完了。
- 【走行コントロール】
- コントローラーの左スティック上下で前後進、
- 右スティックの左右でステアリングを制御。
- ステアリングを振っていくと回転軸側が減速していき(緩旋回から信地旋回)、
- 一杯に倒すと回転軸側は停止。(信地旋回)
- 左スティック中央で右ステアリングを一杯に振ると超信地旋回(速度50%)
- 【砲身上下】右十字キーの △と?ボタンで砲身上下。□ボタンでセンター。
- 【砲塔旋回】 左スティック左右で砲塔旋回。離した位置で止まる。
- 【リアゲート開閉」 左十字キーのUPとDOWNボタンでゲート閉、開。
- 【機関砲】 R1ボタンで主砲発射 40mm自動擲弾銃Mk.19
- 【機銃】 L1ボタンで射撃
- 【ヘッドライト】左十字キーのRIGHTボタンで点灯、LEFTボタンで消灯。
- 【ブレーキランプ】走行中以外に点灯。ヘッドライト点灯時はスモール兼用。
- 【疑似追尾モード】
- R2ボタンで右超信地旋回 + 砲塔左旋回
- L2ボタンで左超信地旋回 + 砲塔右旋回
- */
- #include // Arduino ヘッダインクルード
- #include "SoftwareSerial.h" // EspSoftwareSerial
- #include "DFRobotDFPlayerMini.h"
- //SoftwareSerial mySoftwareSerial(16, 17); // RX, TX EspSoftwareSerial
- HardwareSerial Serial_df(2); // use HardwareSerial UART2 (16pin=RX, 17pin=TX)
- DFRobotDFPlayerMini myDFPlayer;
- void printDetail(uint8_t type, int value);
- #include
- #include
- Servo servo1; // create four servo objects
- int servo1Pin = 27;
- Servo servo2;
- int servo2Pin = 14;
- Servo servo3;
- int servo3Pin = 12;
- int LED_1 = 23; //ブレーキランプ
- int LED_2 = 22; //ヘッドライト
- int LED_3 = 19; //砲撃
- int LED_4 = 18; //銃撃
- int k = 0;
- int s = 0;
- int d_time = 50;
- int angle_servo1 = 80; // 上下;
- int dtime = 10; //砲身上下スピード(遅延時間)
- int anglenow = angle_servo1 ;
- int angle_servo3 = 20 ; // リアゲート閉
- int anglenow3 = angle_servo3 ;
- int motor_speed;
- float steering;
- int pos_ly;
- int pos_lx;
- int pos_ry;
- int pos_rx;
- int AIN1 = 32; // A入力1/APHASE 左モータ AIN1
- int BIN1 = 25; // B入力1/BPHASE 右モータ BIN1
- int PWMApin = A5; // A入力2/AENABLE 左モータ AIN2 IO33
- int PWMBpin = A19; // B入力2/BENABLE 右モータ BIN2 IO26 (IO0は起動時不安定)
- int PWMA = 2; //PWMAチャンネル 0=NG 1=NG 0〜15
- int PWMB = 3; //PWMBチャンネル 0=NG 1=NG 0〜15
- void setup() {
- servo1.setPeriodHertz(50); // Standard 50hz servo PWMサイクル:20mS FS0307 120°
- servo1.attach(servo1Pin, 900, 2100); // (servo1Pin, minUs, maxUs)
- servo2.setPeriodHertz(50); // Standard 50hz servo PWMサイクル:20mS
- servo2.attach(servo2Pin, 500, 2400); // (servo1Pin, minUs, maxUs)
- servo3.setPeriodHertz(50); // Standard 50hz servo PWMサイクル:20mS FS0307 120°
- servo3.attach(servo3Pin, 900, 2100); // (servo1Pin, minUs, maxUs)
- //delay(50);
- //mySoftwareSerial.begin(9600);
- Serial_df.begin(9600); // RX2 = 16, TX2 = 17
- Serial.begin(115200);
- //Ps3.begin("00:11:22:33:44:55"); //SixaxisPairToolで調べたmac adresに修正
- //Ps3.begin("0c:b8:15:f5:8a:a2"); // PS3-Eコントローラ ESP32-1
- Ps3.begin("00:00:00:00:00:26"); // PS3-Eコントローラ ESP32-2
- Serial.println("PS3 Ready");
- if (!myDFPlayer.begin(Serial_df)) { //Use HardwareSerial to communicate with mp3.
- Serial.println(F("Unable to begin:"));
- Serial.println(F("1.Please recheck the connection!"));
- Serial.println(F("2.Please insert the SD card!"));
- while (true) {
- delay(0); // Code to compatible with ESP8266 watch dog.
- }
- }
- Serial.println(F("DFPlayer Mini online."));
- myDFPlayer.volume(20); //Set volume value. From 0 to 30
- ledcSetup(PWMA, 5000, 8); //チャンネル,周波数,解像度(8bit=256段階)
- ledcAttachPin(PWMApin, PWMA); //ledPinをPWMCHチャンネルに接続
- ledcSetup(PWMB, 5000, 8); //チャンネル,周波数,解像度(8bit=256段階)
- ledcAttachPin(PWMBpin, PWMB); //ledPinをPWMCHチャンネルに接続
- pinMode(AIN1, OUTPUT);
- pinMode(BIN1, OUTPUT);
- pinMode(LED_1, OUTPUT);
- pinMode(LED_2, OUTPUT);
- pinMode(LED_3, OUTPUT);
- pinMode(LED_4, OUTPUT);
- LEDtenmetsu(LED_2);
- servo1.write(angle_servo1); // 0 - 180
- delay(100);
- servo2.write(90); // 0 - 180
- delay(100);
- servo3.write(angle_servo3); // 0 - 180
- delay(200);
- servo3.detach();
- myDFPlayer.play(28); //エンジン始動
- delay(2000);
- }
- void loop() {
- if (Ps3.isConnected()) {
- pos_lx = Ps3.data.analog.stick.lx;
- pos_lx = pos_lx + 128;
- pos_ly = Ps3.data.analog.stick.ly;
- pos_ly = pos_ly + 128;
- pos_rx = Ps3.data.analog.stick.rx;
- pos_rx = pos_rx + 128;
- //砲塔旋回 && pos_ly > 102 && pos_ly
- if ( pos_lx > 230 && pos_ly > 102 && pos_ly
- servo2.write(105);
- } else if (pos_lx < 25 && pos_ly > 102 && pos_ly
- servo2.write(75);
- } else { //停止
- servo2.write(90);
- }
- //砲身上下
- if ( Ps3.event.button_down.square) { // center
- if (anglenow > angle_servo1) {
- for (anglenow = anglenow; anglenow >= angle_servo1; anglenow -= 1) {
- servo1.write(anglenow);
- delay(dtime);
- }
- }
- else {
- for (anglenow = anglenow; anglenow <= angle_servo1; anglenow += 1) {
- servo1.write(anglenow);
- delay(dtime);
- }
- }
- }
- if ( Ps3.event.button_down.triangle) { // up
- for (anglenow = anglenow; anglenow >= (angle_servo1 - 45); anglenow -= 1 ) {
- servo1.write(anglenow);
- delay(dtime);
- }
- }
- if ( Ps3.event.button_down.cross) { // down
- for (anglenow = anglenow; anglenow < (angle_servo1 + 35); anglenow += 1 ) {
- servo1.write(anglenow);
- delay(dtime);
- }
- }
- // リアゲート開閉
- if ( Ps3.event.button_down.up) { // ゲートup=閉
- servo3.attach(servo3Pin);
- for (anglenow3 = anglenow3; anglenow3 >= angle_servo3; anglenow3 -= 1 ) {
- servo3.write(anglenow3);
- delay(20);
- }
- delay(50);
- servo3.detach();
- }
- if ( Ps3.event.button_down.down) { // ゲートdown=開
- servo3.attach(servo3Pin);
- for (anglenow3 = anglenow3; anglenow3 < (angle_servo3 + 110); anglenow3 += 1 ) {
- servo3.write(anglenow3);
- delay(20);
- }
- delay(50);
- servo3.detach();
- }
- if (Ps3.event.button_down.circle) {
- if (s == 0) {
- s = 1;
- myDFPlayer.play(28); //エンジン始動
- delay(5000); // delay(8000);
- myDFPlayer.loop(23); //Loop 5th mp3 アイドリング
- delay(d_time);
- } else {
- myDFPlayer.disableLoop(); //アイドリング停止
- s = 0;
- //delay(100);
- }
- }
- if (Ps3.event.button_down.r3) {
- myDFPlayer.disableLoop(); //アイドリング停止
- s = 0;
- }
- if (Ps3.event.button_down.right) {
- digitalWrite(LED_2, HIGH); // Headlight ON
- }
- if (Ps3.event.button_down.left) {
- digitalWrite(LED_2, LOW); // Headlight off
- }
- if (Ps3.data.button.r2) { //右超信地旋回疑似砲塔追尾デモ
- servo2.write(75); //砲塔左旋回
- motor_speed = 255;
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- delay(500);
- }
- if (Ps3.data.button.l2) { //左超信地旋回疑似砲塔追尾デモ
- servo2.write(105); //砲塔右旋回
- motor_speed = 255;
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- delay(500);
- }
- if (Ps3.event.button_down.r1) { //機関砲
- myDFPlayer.play(31);
- for ( int i = 0; i < 3 ; i++) {</li>
- digitalWrite(LED_3, HIGH); //発光
- delay(80);
- digitalWrite(LED_3, LOW);
- delay(220);
- }
- if (s == 1) {
- myDFPlayer.loop(23); //Loop 5th mp3 アイドリング
- delay(d_time);
- }
- }
- if (Ps3.event.button_down.l1) { //機銃
- myDFPlayer.play(30);
- delay(100);
- for ( k = 0; k < 9; k++) {
- digitalWrite(LED_4, HIGH); //発光
- delay(40);
- digitalWrite(LED_4, LOW);
- delay(60);
- }
- if (s == 1) {
- myDFPlayer.loop(23); //Loop 5th mp3 アイドリング
- delay(d_time);
- }
- }
- //走行コントロール
- /* pos_ly = Ps3.data.analog.stick.ly;
- pos_rx = Ps3.data.analog.stick.rx;
- pos_ly = pos_ly + 128;
- pos_rx = pos_rx + 128;
- */
- /* //左スティックがセンター付近は停止(ブレーキ)
- if (pos_rx > 102 && pos_rx < 152 && pos_ly > 102 && pos_ly
- motor_run(0, 0, 0, 0, 1);
- }
- */
- //前進
- if (pos_ly <= 102 && pos_rx >= 102 && pos_rx <= 152) {
- motor_speed = map(pos_ly, 102, 0, 0, 255);
- motor_run(motor_speed, 0, motor_speed, 0, 0);
- }
- //後進
- else if ( pos_ly >= 152 && pos_rx >= 102 && pos_rx <= 152) {
- motor_speed = map(pos_ly, 152, 255, 0, 255) ;
- motor_run(motor_speed, 1, motor_speed, 1, 0);
- }
- //前進右緩旋回、信地旋回
- //else if ( pos_ly <= 102 && pos_rx > 152 && pos_rx <= 245) {
- else if ( pos_ly <= 102 && pos_rx >= 152) {
- motor_speed = map(pos_ly, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_rx, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 0, steering, 0, 0);
- }
- //前進左緩旋回、信地旋回
- //else if ( pos_ly <= 102 && pos_rx < 102 && pos_rx >= 10) {
- else if ( pos_ly <= 102 && pos_rx <= 102) {
- motor_speed = map(pos_ly, 102, 0, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_rx, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 0, motor_speed, 0, 0);
- }
- //後進右緩旋回、信地旋回
- //else if ( pos_ly >= 152 && pos_rx > 152 && pos_rx <= 245) {
- else if ( pos_ly >= 152 && pos_rx >= 152 ) {
- motor_speed = map(pos_ly, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_rx, 152, 255, 0, 255) / 255.00));
- motor_run(motor_speed, 1, steering, 1, 0);
- }
- //後進左緩旋回、信地旋回
- //else if ( pos_ly >= 152 && pos_rx < 102 && pos_rx >= 10) {
- else if ( pos_ly >= 152 && pos_rx <= 102 ) {
- motor_speed = map(pos_ly, 152, 255, 0, 255);
- steering = motor_speed * (1.00 - (map(pos_rx, 102, 0, 0, 255) / 255.00));
- motor_run(steering, 1, motor_speed, 1, 0);
- }
- //右超信地旋回
- else if (pos_rx >= 245 && pos_ly >= 102 && pos_ly <= 152) {
- motor_speed = 204;
- motor_run(motor_speed, 0, motor_speed, 1, 0);
- }
- //左超信地旋回
- else if (pos_rx <= 10 && pos_ly >= 102 && pos_ly <= 152) {
- motor_speed = 204;
- motor_run(motor_speed, 1, motor_speed, 0, 0);
- }
- else { //停止(ブレーキ)
- motor_run(0, 0, 0, 0, 1);
- }
- }
- }
- void motor_run(int D0, int D1, int D2, int D3, int D4) {
- //D0 : モータスピード(左)
- //D1 : モータA(左)1 = HIGH / 0 = LOW
- //D2 : モータスピード(右)
- //D3 : モータB(右)1 = HIGH / 0 = LOW
- //D4 : LED_3 ON/OFF 1 = HIGH / 0 = LOW
- //analogWrite(PWMA, D0);
- ledcWrite(PWMA, D0); //(チャンネル,解像度)
- digitalWrite(AIN1, D1);
- //analogWrite(PWMB, D2);
- ledcWrite(PWMB, D2); //(チャンネル,解像度)
- digitalWrite(BIN1, D3);
- digitalWrite(LED_1, D4);
- }
- void LEDtenmetsu(int LED) {
- for (int i = 0; i
- digitalWrite(LED, HIGH);
- delay(500);
- digitalWrite(LED, LOW);
- delay(500);
- }
- }