








2018-09-02~04
RC可動のコントロール装置はM3グラントから移設することにします。
既に取り付けてあるモータはFA-130タイプのため、VSタンクユニットでは力不足です。
AE-TB6612モータードライバを使ってトルクアップします。
ところが、履帯を履かせて走らせると、少し動いて直ぐに止まってしまいます。
今までの実績よりモータ電流が多いのが原因でしょうが、動作停止のメカニズムが判りません。
あれこれ確認しながら改善策を試してみます。
その結果、
1. AE-TB6612のインプットを2.2KΩでGNDに接続させていたのを10KΩに変更。
2. AE-TB6612のVM(VCC)-GND間に10μF+0.1μFを挿入。
これで、不安定な動作(誤動作)はしなくなりました。
次に、砲塔旋回機構の組込みです。
こちらの方も、そのままでは力不足で動きが弱々しいです。
それに旋回速度も速すぎます。
ギヤを追加して減速する事でトルクアップを狙いましたが、未だトルク不足です。
そこで、1chのモータドライバDRV8832を使うことにします。
しかし、納得のいくほどトルクアップしていません。
時折止まってしまいます。
こちらの方もVCC-GND間に10μFを挿入します。
VREF-VSET間に50kΩ、VSET-GND間75kΩを接続してモータ駆動電圧を3Vに設定しました。
これで力強く旋回する様になりました。
但し、未だ旋回速度が速いので電圧を下げてみようと思います。
砲塔を旋回させるために、メンテも考慮して薄いプラ板のキー挿入して連結します。

今回、実施した回路図です。
一部漏れが有ったので、訂正版に差し替えておきます。
更に誤動作対策を追加しました。(2018-09-14)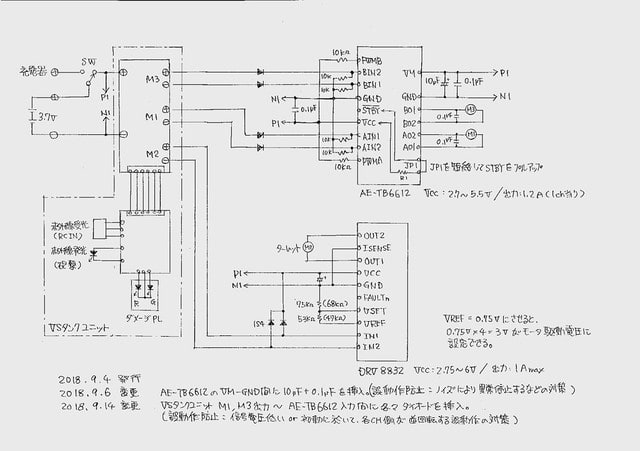
今まさに台風21号の影響で、すごい風の音がしています。
※コメント投稿者のブログIDはブログ作成者のみに通知されます