








2022-02-26
先日製作した模型を100均の回転テーブルを手動で回して録画しましたが動スムーズに動かせていません。
そこで、電動化してみようと思いました。
▼先ず、100均の回転テーブルです。
▼裏のネジを外し分解します。
バリ取り処理がされていないので、不要なバリを除去してスムーズに動くようにしておきます。(画像なし)
▼Arduinoスターターキットに入っていて使っていなかったステッピングモータを使いました。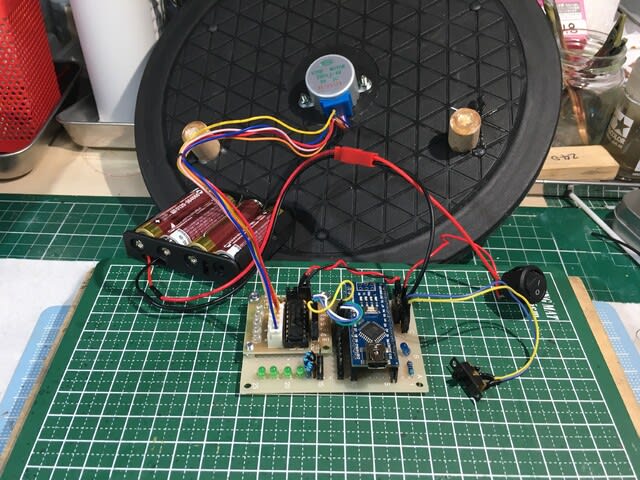
製作過程を簡単に記述します。
▼回転テーブルのネジを外し、テーブルの下側にステッピングモータをM3ネジで固定します。
この時、回転軸がズレないように回転テーブルの上下をドッキングさせて作業します。
▼下側にモータが飛び出しているので、20mmの足を3個取り付けます。
足の先には100均で仕入れたゴムの滑り止めを貼ります。

▼上板はモータの出力軸の回転止め形状に合わせて丸穴の両端に2mmのプラ板を貼り、
ナイフで上手くはまるように削って調整します。
天板は載せておくだけですが、問題なく動いています。
▼折角、Arduinoでコントロールしているので、回転スピード2段階、正逆回転できるようにします。
電源は乾電池4Pの6VとUSB5Vの2電源仕様です。

【回路図】

【スケッチ】
- // stepper_motor_controll_2speed_ccw
- #include
- const int MOTOR_STEPS = 2048;
- const int BUTTON1 = 7; // speed 1/2rpm
- const int BUTTON2 = 6; // CW/CCW
- const int LED = A1;
- int RPM = 1;
- int val1 = 0;
- int val2 = 0;
- int c = 1 ;
- Stepper myStepper(MOTOR_STEPS, 2, 4, 3, 5);
- void setup() {
- myStepper.setSpeed(RPM);
- pinMode(LED, OUTPUT);
- pinMode(BUTTON1, INPUT);
- pinMode(BUTTON2, INPUT);
- // digitalWrite(LED, HIGH);
- }
- void loop() {
- val1 = digitalRead(BUTTON1);
- val2 = digitalRead(BUTTON2);
- if (val1 == HIGH) {
- RPM = 2;
- myStepper.setSpeed(RPM);
- digitalWrite(LED, HIGH);
- } else {
- RPM = 1;
- myStepper.setSpeed(RPM);
- digitalWrite(LED, LOW);
- }
- if (val2 == HIGH) {
- c = -1;
- } else {
- c = 1;
- }
- myStepper.step(5 * c);
- }
100均の回転テーブルを電動化
2022-02-28
100均で購入したシールを貼ってみました。

100均で購入したシールを貼ってみました。