








メカ部分は両軸のステッピングモーターにスライド用ボールネジ、ロータリーエンコーダを組みあわせる。タッチパネル、CP1Lシーケンサ、ステッピングモータードライバで構成。

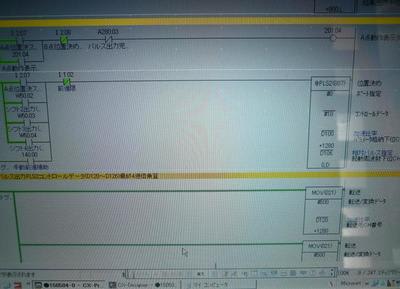
CP1LシーケンサよりステッピングモーターパルスCW.CCWを出力する。
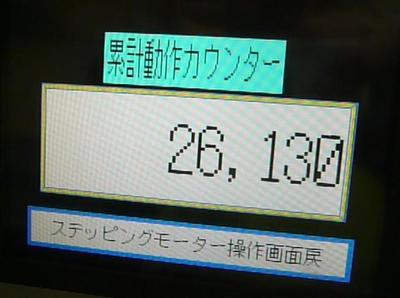
デモ運転の累計動作カウンター。
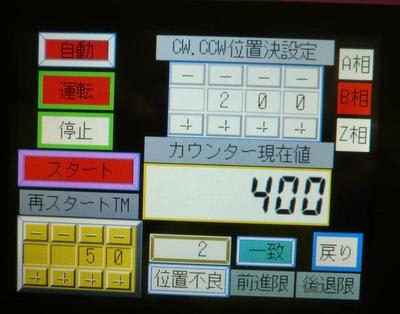
デモ運転タッチパネル画面。位置決め不良判定データは±1パルスに設定する。
ステッピングモーター1パルスは0.225°の回転角。

位置決め判定不良は24時間以上の運転でも出ない。
ボケ防止のつもりで製作したが何も効果が出ないと新聞記事...やっぱり最近はプログラムがパッとヒラメカナイ、そして直ぐ忘れるゾ。
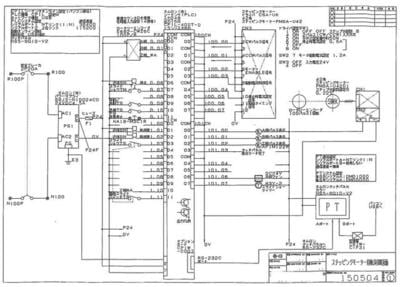
全てオリジナル(ハード.ソフト)なので色々、手直しが有ったがステッピングモーター駆動1軸テーブルの最終完成CAD図面。
本来のステッピングモーター利用はオープンループで簡単位置決めとなるが、今回は手元にロータリーエンコーダが有ったので位置誤差判定可能な完全クローズド??位置制御システムとなった。タッチパネル画面はスライドショーも可能となる様に自動切替のシフト(INC)回路も入れた。
CP1LシーケンサよりステッピングモーターパルスCW.CCWを出力する。
デモ運転の累計動作カウンター。
デモ運転タッチパネル画面。位置決め不良判定データは±1パルスに設定する。
ステッピングモーター1パルスは0.225°の回転角。
位置決め判定不良は24時間以上の運転でも出ない。
ボケ防止のつもりで製作したが何も効果が出ないと新聞記事...やっぱり最近はプログラムがパッとヒラメカナイ、そして直ぐ忘れるゾ。
全てオリジナル(ハード.ソフト)なので色々、手直しが有ったがステッピングモーター駆動1軸テーブルの最終完成CAD図面。
本来のステッピングモーター利用はオープンループで簡単位置決めとなるが、今回は手元にロータリーエンコーダが有ったので位置誤差判定可能な完全クローズド??位置制御システムとなった。タッチパネル画面はスライドショーも可能となる様に自動切替のシフト(INC)回路も入れた。










※コメント投稿者のブログIDはブログ作成者のみに通知されます