ロボットと3Dプリンターの位置制御する駆動源の「ステッピング・モーター」のプログラムがやっと理解ながら作成する段階になった。
以前から、暇さえできれば手元のArduinoと別電源を利用しながら プログラム講師はネット情報を参考にし試して学習した。どれも簡単に出来る筈が同じマイコンでも プログラム作成の個人差とか 使用パーツの違いで LED点滅実験の様には 簡単とも言えず 突然のエラー・コメントも 特別な英語メッセージなので翻訳しながら解決してきたが 慣れないことは何でも大変なのだ。
元々はC言語が基本なので、言語の基礎も勉強しながらプログラムが完成したが 昨年学習したセンサー制御のプログラムはもう忘れていたから始末が悪い。ネットにある理解出来た参考コードを、土台にして それを6回程重ね 各数値を変更し 最後に「回転モードを4種類に、指定回転角度3種類・速度・休止時間など変えながら 一台のモータを15秒程度の繰返し動作をさせることが出来た。
機械技術なら、精密加工しても出来ない様な正確な動きを ソフトを使えば簡単に出来てしまう見本みたいだ。電子プログラムは、モニター表示で結果確認するのが常だが これはモータの回転動作となるので、一台でもリズミカルな ダンスをさせる事も可能だと思えてきたが 玩具の様なマイコンとモーターで ここまで出来るこの技術は やはり現代の魔法の様だ。
判って見れば、3Dプリンターも、ダンスロボットも 縄跳びロボットも 部品さえ揃えられれば可能だが プログラム作成も パーツ性能表も見ても 文字は小さいし 僅かな記入ミスでコンパイル・エラー警告になるし バグを見つけては 訂正を繰り返す作業は 理解は出来ても 残念ながら実際に作るのは私の歳ではもう時間切れだと思った。
しかし、配線とプログラム・ソフトだけで動かせる 制御可能なモーターは今後の重要パーツとして残るので この部分が少しでも理解出来たのと 夢も広げてくれたのは嬉しい事だろう。
スケッチ・・時間はマイクロセカンドから数時間、回転角度は微少角でも高速回転も自在だ

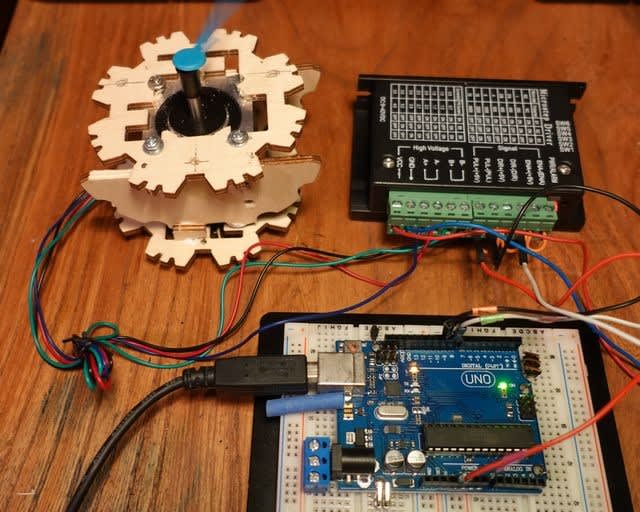
動作確認中・・左上がモーター、プログラムはPCで作成し右下 Arduinoへ書込む