2024年9月26日(木曜日) 曇り時々雨
Nゲージ鉄道模型工作を始めてから3カ月になります。
Nゲージ鉄道模型工作を始めたきっかけはユーチューブで見た
模型列車をマイコンで制御して自動運転させる動画でした。
鉄道模型マニアの友人にこのことを話したところ、
「それは面白そうだ。 自分が持っている模型機関車を自動運転
させてみたいからそのシステムを作って欲しい」と頼まれました。
私も「Nゲージ」に興味を持っていたので、レールやポイント
など「自動運転」に最低限必要な部品を購入して工作を始めました。
機関車は「動力台車」など、自作が無理な部分はメーカー製を
購入しましたが、自分でできるものは「自分で作る」をモットーに
自作して工作を続けました。
しかし、時間が経ち、いろいろな条件があって、その友人は
「自動運転」の実現は無理だということで計画は立ち消えになって
しまいました。
私は、元々マイコンのプログラミングが好きなこともあって
自動運転開発用に購入した最低限のレールセットで自動運転もどきを
工作してきました。
どうして動かないの? あーでもない、こーでもない、おーそうかぁ
やっと動いた・・・ あー、疲れた・・・ これでおしまいにしよう
というわけでしばらく工作を中断していました。
久しぶりに部品箱をみてみたら「踏切遮断機」の開閉用に購入して
おいた「サーボモーター」がありました。
小型の安物のサーボモータは放っておいても惜しくはありませんが、
これを使ってみようかな? という気持ちになりました。
小型サーボモーター 1個 550円 2つ買ってありました。

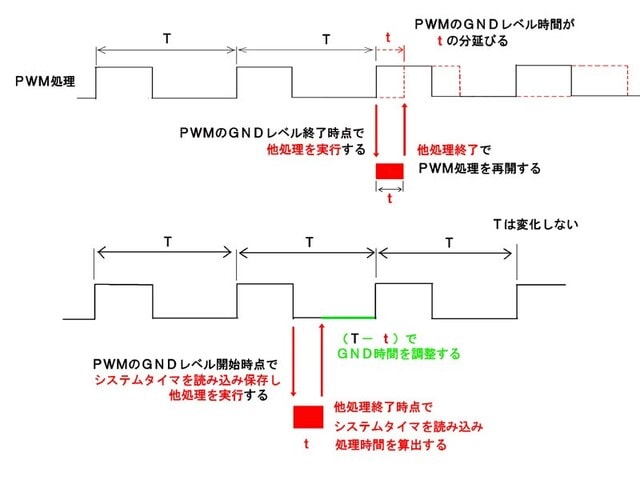
サーボモーターに送り込むパルス幅の長短でサーボ軸は左右に
ある角度まで回転して停止します。

可変抵抗器(2KΩボリューム)の操作でパルス幅が変化するマイコン出力を
サーボモーターに入力しました。

パルス幅の変化に追従して左右に振れるサーボホーンの動きをご覧ください。
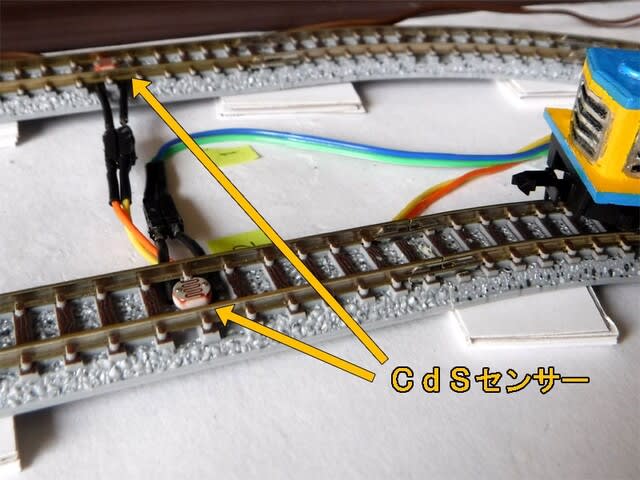
さぁ、次は機関車の位置を検出して遮断機を下げたり上げたりする
プログラムの工作を始めます。
うまくいくかな? 頑張ります。 応援をよろしくお願いします。