








先日の茨城ノード大会でのレスキューラインの競技コースです。
こちらが、Aフィールドです。
スタートしたら、最初に「にょろにょろ」があって、ちゃんとライントレースができているかを確認します。
直線のあとに、ギャップ
直角で右折して、上りの傾斜路、直線、下りの傾斜路、直角で右折・・・と続きます。
直線に2つのスピードバンプが置かれ、そのあとは小さな「にょろにょろ」
ここから4連続の交差点です。
まずは、緑マーカーが交差点の先にあるので直進
直角で右折の後に行き止まりでUターン
今度は直角を左折して
緑マーカーが手前にあるので、交差点で左折です。
また直角の後に緑マーカーが無いので直進します。
この後は、バンプ、障害物・・・と続きます。
ノード大会としては、結構難しいです。
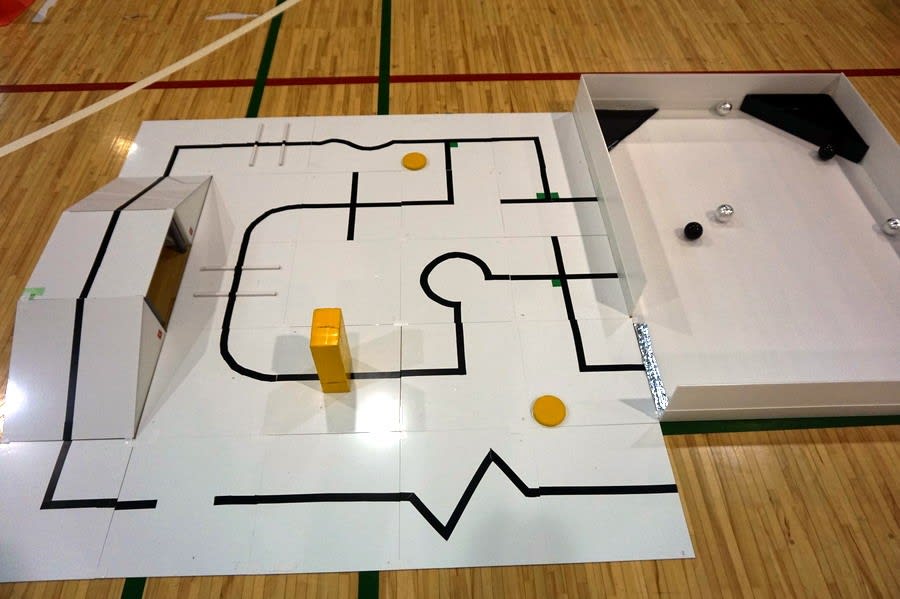
こちらが、Bフィールドです。
私がデザインしました。
初心者向け(ニッポンリーグ向け)で、超簡単なコース設定となっております。

スタートしたら、最初は「にょろにょろ」
そのあとは、バンプ、ギャップと続き・・・ゆるいカーブでUターンした後に直線、障害物、直線です。
このあと、交差点(直進)、行き止まりでUターン、交差点で右折
ゆるいカーブの後にギャップがあって・・・直線、上り傾斜路、直線、下り傾斜路と続きます。
はい、もう、これなら全員満点でしょう!
で・・・用意してもらったコースの最初の「にょろにょろ」がきつかった(鋭角っぽい)ので、下の写真のように、ショートカットしました。

これで・・・ほとんどのチ-ムが避難ゾーンに入ることができました。
ちょっと簡単すぎたかなぁ(笑)
ところで、避難ゾーンに入った後の動きとして・・・
被災者を探して(検知して)避難場所に運び込むことを意図的に実施できているチームは居なかったように思います。
大昔のランダム走行のような動きで・・・「偶然、被災者を押し込んだ」感じでした。
レベル1(平たい黒い三角形)の場合は、被災者が避難場所に入って、ロボットに接していなければ得点になるのですが・・・
ロボットが三角形に突進して、(被災者を押し込んだまま)ウンウン動けなくなっているのは・・・救助成功じゃないでしょう。
せめて、「被災者を押し込んだ後に、ロボットが黒三角から出れば得点」にルールを変更してほしいです。
そうでなければ、運や偶然によって順位が左右される確率が高いと思います。
補足
ちゃんとルールの 3.5.12 にロボットが「被災者から離れたら被災者救出成功」と書かれていました。




