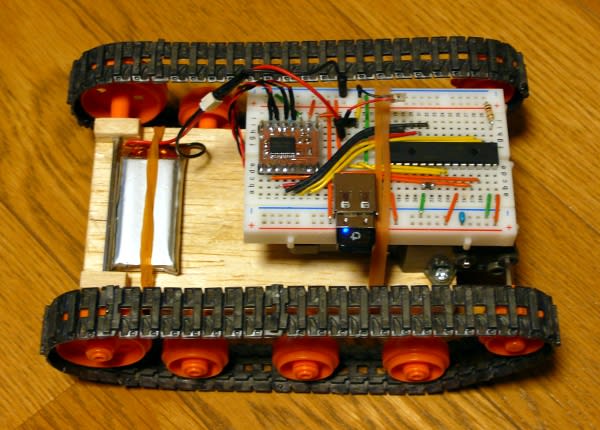
ブレッドボードにPIC24FJ64GB002とUSB BluetoothドングルとモータコントローラTB6612FNGを載せて配線しました。あとは10μFのコンデンサ2個、10Kオームのプルアップ抵抗、PICへの供給電圧調整用ショットキダイオード、モータノイズキラーコンデンサ2個、パスコン、バッテリモニタと至ってシンプルな部品構成です。
電源に単3乾電池を2個使う予定でしたが、2個モータを回すと電圧が低下してBlueTooth USBドングルが正常に動作しません。
そこで、モータを単3乾電池2本で駆動し、制御回路をリチウムポリマ電池で駆動してみました。これなら安定して動作しますが、電源の管理が大変です。
最終的に容量の大きなリチウムポリマ電池を使うことで、単電源でOKになりました。モータ停止時の消費電流は約30mAです。
Bluetooth USBドングルとモータドライブICにリチウム電池から直接電源を供給し、PICにはショットキダイオードを通して電源を供給しています。
念のために3Vのバッテリモニタを搭載しましたが、今回のようなモータ負荷が大きい場合は、もっと低電圧のバッテリモニタでよいようです。
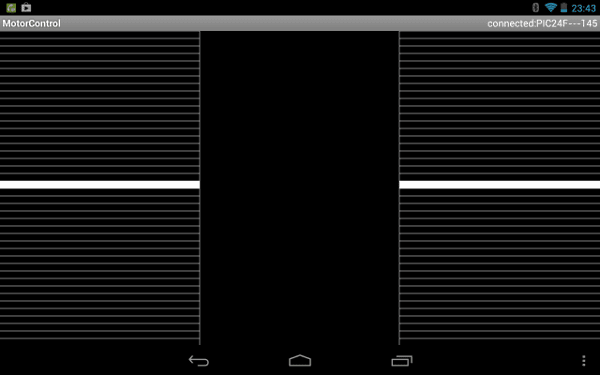
Android端末のモータコントロールアプリは前後20ステップの分解能で動作しますが、今回のキャタピラ車には十分です。
走らせてみるまで分からなかったのが走行スピード。ツインモータギヤボックスを組み立てるときに、203:1の低速ギヤ比と58:1の標準ギヤ比が選択できるようになっていましたが、標準のギヤ比で組みました。
またトラック&ホイールセットの駆動軸にセットするスプロケットホイールもサイズが大小2種類あり、小のスプロケットホイールをセットしました。
走行させてみるとやや遅めスピードですが、走行中のキャタピラの継ぎ目の音が気になるので、まあこの程度の最大スピードでよいところかもしれません。
左右のスピードコントロールと正逆転コントロールがあるので、インドアプレーンより操作が難しく感じます。
| Trackback ( )
|
|






現状の操作を残したままで、
ミキシングで前後直進、曲がるという操作部分を(画面の真ん中あたりに)加えるのはどうでしょうか。