Indoor Airplane World
SEARCH
このブログ内で
ウェブ全て
CATEGORY 1
ショップ
(146)
飛行会
(325)
インドア・プレーン
(168)
TWE-Lite関連
(70)
船
(159)
インドア・ヘリコプター
(27)
マイクロ・ブラシレス・モータ
(3)
プリント基板
(29)
PIC
(102)
PSoC
(23)
AVR
(15)
Android
(112)
Raspberry Pi
(48)
Arduino
(34)
3Dプリンタ
(92)
データシート集
(1)
出版書籍・サポート・取材
(24)
関連書籍紹介
(5)
ヒント・アイデア
(5)
熱中生活フェスタ2007
(6)
NHK番組「熱中時間」
(14)
著作権
(1)
手づくりひこうき教室
(14)
空撮
(1)
ギター
(77)
旅行
(12)
電気自動車(EV)
(70)
PC
(29)
はじめての方へ
(1)
未分類
(99)
BOOKMARK
よく使っている基板業者FusionPCB
電動飛行機
フォトアルバム(2005年まで)
技術情報
PIC/AVR
投稿作品
インドアプレーン入門Q&A
Indoor Links
NEW MEMO
RECENT ENTRY
飛行会開催日程
日程 第315回湘南スローフライヤークラブ飛行会
日程 第314回湘南スローフライヤークラブ飛行会
トイ送信機のノブをスティックタイプに変更
日程 第313回湘南スローフライヤークラブ飛行会
トイプレーン受信機にバッテリモニタを搭載
2モータ制御に改造した誘電一型
切り替え式Li-Po充電器LPC30450USB
日程 第312回湘南スローフライヤークラブ飛行会
マイクロスライドスイッチ
RECENT COMMENT
鈴木/
日程 第315回湘南スローフライヤークラブ飛行会
柴田/
日程 第315回湘南スローフライヤークラブ飛行会
仁科/
日程 第315回湘南スローフライヤークラブ飛行会
弓納持/
日程 第315回湘南スローフライヤークラブ飛行会
鈴木/
日程 第315回湘南スローフライヤークラブ飛行会
仁科/
日程 第314回湘南スローフライヤークラブ飛行会
大岩/
日程 第314回湘南スローフライヤークラブ飛行会
柴田/
日程 第314回湘南スローフライヤークラブ飛行会
弓納持/
日程 第314回湘南スローフライヤークラブ飛行会
鈴木/
日程 第314回湘南スローフライヤークラブ飛行会
-->
CONTACT US
メカフグのラダー周りを改良
船
/
2015-07-17
前回のテストでは、照りつける太陽の下で走航中に本体内部が雲ってくる現象が見られました。その原因はラダーコントロールシャフトとパイプの隙間からの水の侵入が原因と考え、ラダー周りを改良しました。
メカフグの船首部分の垂直安定板をカットして、可動ラダーに置き換えてテストした結果、旋回できることが分かりました。メカフグはスピードが遅いので旋回には大きなラダーが必要です。大きなラダーだと運搬性が悪いので、双ラダーに変更しました。
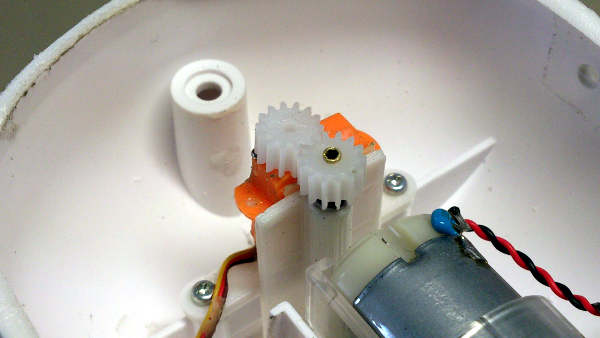
ラダーとサーボのリンケージをピニオンギヤに変更しました。同じ歯数の組み合わせなのでサーボの舵角がラダーの舵角になり、使用したデジタルマイクロサーボでは、最大約90度の舵角になります。
改良に必要なパーツ類が即座に出力できる、3Dプリンタのありがたさをここでも実感。
オリジナルでは単3乾電池1個でドライブする仕様なので、LiPo電池1セルでは少しオーバーパワーです。スロットルを上げて尾ひれを早く動かしてもスピードはそれほど出ません。
スロットルを下げてゆっくり動かす方がユーモラスで効率もよさそうです。重心合わせのために880mAhのLiPo電池を載せましたが、消費電力が非常に少ないので、飽きるほど長時間楽しめます。
オリジナルでは電源スイッチのON/OFFに複雑な防水機構が採用されていますが、マリオの脚部に仕組んだコネクタで電源のON/OFFができるように改造しています。また電池の充電もこのコネクタから可能です。
前進・後進ができるBluetooth受信機
BTBOAT
を搭載して、前進だけを使っています。全備重量は145g。
コメント (
2
)
|
Trackback ( )
«
日程 第198回...
Arduino Pro m...
»
コメント
考えること
(
楓
)
2015-07-19 14:27:00
皆さん同じなのですね♪
(双ラダー)自分も採用しています。SWも、すでにスヌーピーで実施済ですけど…(^-^ゞ
走行中に旗持っていたのでか風で離脱(飛び込み)
状態になり停船(OFF)してしまいました。
スヌーピーもいいですね
(
Unknown
)
2015-07-20 07:57:08
楓さんも既に双ラダーを実践されていたんですね。
スヌーピーのSTLファイルを見つけました。
コメントを投稿する
名前
タイトル
URL
コメント
※絵文字はjavascriptが有効な環境でのみご利用いただけます。
▼ 絵文字を表示
携帯絵文字
リスト1
リスト2
リスト3
リスト4
リスト5
ユーザー作品
▲ 閉じる
コメント利用規約
に同意の上コメント投稿を行ってください。
コメント利用規約に同意する
数字4桁を入力し、投稿ボタンを押してください。
でんき予報
Twitter
Facebook
MY BOOK 2
この本をAMAZONで購入
MY BOOK
この本をAMAZONで購入
BOOK STORE
関連書籍のお求めは
こちらから
携帯
ENTRY ARCHIVE
2024年07月
2024年06月
2024年05月
2024年04月
2024年03月
2024年02月
2024年01月
2023年12月
2023年11月
2023年10月
2023年09月
2023年07月
2023年06月
2023年05月
2023年04月
2023年03月
2023年02月
2023年01月
2022年11月
2022年10月
2022年09月
2022年08月
2022年07月
2022年06月
2022年05月
2022年04月
2022年01月
2021年12月
2021年11月
2021年09月
2021年08月
2021年06月
2021年05月
2020年12月
2020年08月
2020年07月
2020年06月
2020年02月
2020年01月
2019年12月
2019年11月
2019年10月
2019年09月
2019年08月
2019年07月
2019年06月
2019年05月
2019年04月
2019年03月
2019年02月
2019年01月
2018年12月
2018年11月
2018年09月
2018年08月
2018年06月
2018年05月
2018年03月
2018年02月
2017年12月
2017年11月
2017年10月
2017年08月
2017年07月
2017年06月
2017年05月
2017年04月
2017年03月
2017年02月
2017年01月
2016年12月
2016年11月
2016年10月
2016年09月
2016年08月
2016年07月
2016年06月
2016年05月
2016年04月
2016年03月
2016年02月
2016年01月
2015年12月
2015年11月
2015年10月
2015年09月
2015年08月
2015年07月
2015年06月
2015年05月
2015年04月
2015年03月
2015年02月
2015年01月
2014年12月
2014年11月
2014年10月
2014年09月
2014年08月
2014年07月
2014年06月
2014年05月
2014年04月
2014年03月
2014年02月
2014年01月
2013年12月
2013年11月
2013年10月
2013年09月
2013年08月
2013年07月
2013年06月
2013年05月
2013年04月
2013年03月
2013年02月
2013年01月
2012年12月
2012年11月
2012年10月
2012年09月
2012年08月
2012年07月
2012年06月
2012年05月
2012年04月
2012年03月
2012年02月
2012年01月
2011年12月
2011年11月
2011年10月
2011年09月
2011年08月
2011年07月
2011年06月
2011年05月
2011年04月
2011年03月
2011年02月
2011年01月
2010年12月
2010年11月
2010年10月
2010年09月
2010年08月
2010年07月
2010年06月
2010年05月
2010年04月
2010年03月
2010年02月
2010年01月
2009年12月
2009年11月
2009年10月
2009年09月
2009年08月
2009年07月
2009年06月
2009年05月
2009年04月
2009年03月
2009年02月
2009年01月
2008年12月
2008年11月
2008年10月
2008年09月
2008年08月
2008年07月
2008年06月
2008年05月
2008年04月
2008年03月
2008年02月
2008年01月
2007年12月
2007年11月
2007年10月
2007年09月
2007年08月
2007年07月
2007年06月
2007年05月
2007年04月
2007年03月
2007年02月
2007年01月
2006年12月
2006年11月
2006年10月
2006年09月
2006年08月
2006年07月
2006年06月
2006年05月
2006年04月
2006年03月
2006年02月
2006年01月
2005年12月
2005年11月
2005年10月
2005年09月
2005年08月
2005年07月
2005年06月
2005年05月
2005年04月
2005年03月
2005年02月
2005年01月
2004年12月
2004年11月
2004年10月
ブログの作成・編集
gooメール










(双ラダー)自分も採用しています。SWも、すでにスヌーピーで実施済ですけど…(^-^ゞ
走行中に旗持っていたのでか風で離脱(飛び込み)
状態になり停船(OFF)してしまいました。
スヌーピーのSTLファイルを見つけました。