前回は送信機から送られてくる8ビットのA/D変換値を、受信機側でPWM8を使ってモータのコントロール・テストを行いました。このとき使った2.4GHzトランシーバー・モジュールはCYRF6936が載ったものです。
その後のテスト中動作不安定で時々バインドできなくなることがあり、CYWUSB6935が載った2.4GHzトランシーバー・モジュールに変更してテストを始めました。
ところが前者はCypressからドライバが提供されていますが、後者には公開されているドライバがありません。そこでこちらで公開されているプロジェクトを参考にさせていただきました。また今回のテストをするにあたり、管理者の方にアドバイスをいただいたり、ターゲット・デバイスの変更をしてテストしていただくなど大変お世話になりました。
今回は送信機から送られてくる2種類の8ビットのA/D変換値(ラダーとスロットル)のラダー・パートだけを、受信機側でサーボ出力パルスに変換して、サーボのコントロール・テストを行いました。Timer16を使ったサーボの分解能は128ステップです。
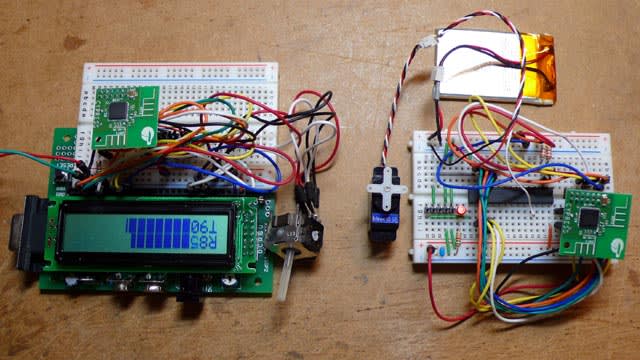
送受信ともCY8C27443-24XPIとCYWUSB6935を使っていますが、受信機側はもっと軽量なPSoCにしなければインドア・プレーンに搭載できません。
今回のテストでわかったことはCYWUSB6935の消費電流が思いのほか大きいということです。テスト用の送信機は3.3Vの電源を供給した時に約90mAも流れています。送信機は良いとしても小容量の電池を使いたい受信機では問題です。
今後は受信側にスロットル・コントロールを組み込んで、2チャンネル受信機としての動作確認をするつもりです。
WirelessUSB 2.4GHz Servo remote control テスト・ムービー
| Trackback ( )
|
|






紹介ありがとうございます。
下手なプログラムでご迷惑をおかけしました。
サーボモーターが上手く動いてますね。
消費電力を落とすのが課題でしょうか。
小型化も必要ですね。
PSoCが空を飛ぶまで・・・
応援&期待しております。
おかげさまで何とかここまで勉強を進めることができました。
せっかくここまできたので、なんとかPSoCが空を飛ぶまでがんばってみたいと思います。
またお世話になると思いますが、その節はよろしくお願いします。
LCDを使用していないなどの違いがあるため、タイミングの影響を受ける部分などは独自に修正し、無事送受信することが出来ました。
tokoさん、Mattyさんありがとうございました。