Indoor Airplane World
SEARCH
このブログ内で
ウェブ全て
CATEGORY 1
インドアプレーン
(0)
ショップ
(147)
飛行会
(330)
インドア・プレーン
(176)
TWE-Lite関連
(70)
船
(159)
インドア・ヘリコプター
(27)
マイクロ・ブラシレス・モータ
(3)
プリント基板
(29)
PIC
(102)
PSoC
(23)
AVR
(15)
Android
(112)
Raspberry Pi
(48)
Arduino
(34)
3Dプリンタ
(92)
データシート集
(1)
出版書籍・サポート・取材
(24)
関連書籍紹介
(5)
ヒント・アイデア
(5)
熱中生活フェスタ2007
(6)
NHK番組「熱中時間」
(14)
著作権
(1)
手づくりひこうき教室
(14)
空撮
(1)
ギター
(77)
旅行
(12)
電気自動車(EV)
(70)
PC
(29)
はじめての方へ
(1)
未分類
(99)
BOOKMARK
よく使っている基板業者FusionPCB
電動飛行機
フォトアルバム(2005年まで)
技術情報
PIC/AVR
投稿作品
インドアプレーン入門Q&A
Indoor Links
NEW MEMO
RECENT ENTRY
FS2A-4CH受信機搭載機のテストフライト
飛行会開催日程
第319回湘南スローフライヤークラブ飛行会
マグネットアクチュエータドライバのテスト
マグネットアクチュエータドライバ
FS2A-4CH受信機搭載機
T8SG-V2-PLUSとFS2A-4CH受信機のバインド
T8SG-V2-PLUSのキャリブレーション
T8SG-V2-PLUSのファームウェアアップデート
T8SG-V2-PLUSをMODE2に変更
RECENT COMMENT
仁科/
第318回湘南スローフライヤークラブ飛行会
柴田/
第318回湘南スローフライヤークラブ飛行会
弓納持/
第318回湘南スローフライヤークラブ飛行会
鈴木/
第318回湘南スローフライヤークラブ飛行会
toko/
T8SG-V2-PLUSとFS2A-4CH受信機のバインド
toko/
T8SG-V2-PLUSとFS2A-4CH受信機のバインド
鈴木/
T8SG-V2-PLUSとFS2A-4CH受信機のバインド
鈴木/
T8SG-V2-PLUSのファームウェアアップデート
toko/
T8SG-V2-PLUSのファームウェアアップデート
鈴木/
T8SG-V2-PLUSのファームウェアアップデート
-->
CONTACT US
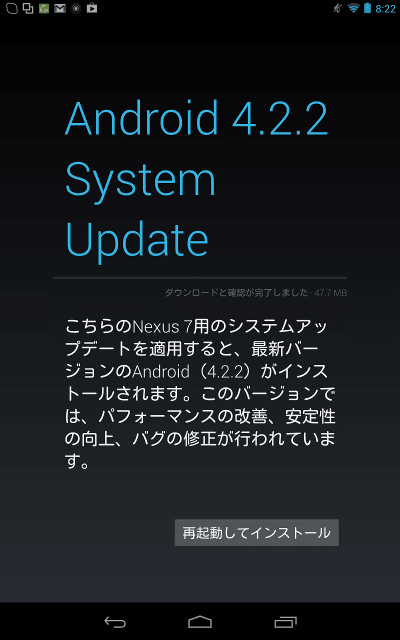
Nexus7をAndroid 4.2.2にシステムアップデート
Android
/
2013-02-20
Androidアプリの勉強はなかなか進みません。まあこちらは全くの趣味なのでのんびりやってます。
このところ、Nexus7のAndroidバージョンを4.2.2にシステムアップデートしたという記事があちこちで見られるようになり、中にはアップデート通知が来るまで待てず、手動でアップデートしたという記事もありました。
Android 4.2.2では、バグの修正や電源管理の最適化、左プルダウンメニューでダウンロードの目安時間表示、右プルダウンメニューでWi-Fi、BluetoothアイコンタップによるON/OFF切り替え等ができるということです。
電源管理の最適化により、Nexus7の駆動時間が8時間から10時間に延びるという記事もあり、手動でアップデートするつもりで数日前にファイルをダウンロードしました。
しかし具体的なアップデート方法がわからずそのままにしてありました。
そして今朝、アップデート通知が来ました。
早速インストールして、無事Android 4.2.2にアップデートできました。
コメント (
4
)
|
Trackback ( )
«
2モータ制御赤...
「大人の飛行...
»
コメント
Androidアプリ開発の続き
(
Kine
)
2013-02-28 19:15:57
ランニングエレクトロニクス社のPIC基板 SBDBTのファームウェアを改造したところ、やっと動き始めました。
今回の改造は、tokoさんのパルス幅を変化させる方式の、赤外線出力プログラムの追加です。
ブレッドボード上の SBDBTの出力に、FETと抵抗器と赤外線LEDを取付けました。
出力している赤外線の確認には、tokoさんのパルスチェッカを利用しました。
また、ブレッドボード上の FETのゲート端子には、ロジックアナライザーを接続し波形を観測しています。
前回の投稿で、開発環境は、MPLAB IDE Xバージョンと記しましたが、以前のV8バージョンと比べると、操作方法が全く違い、使い勝手が悪いので、以前のV8バージョンで開発しました。
また、前回、Cコンパイラは、XC16で、HEXファイルが出来たと記しましたが、内容をエディタで見ると、購入時に書込まれているファームウェアとは、違いました。 XC16をC30コンパイラに変更しビルドすると、購入時と同じ内容のHEXファイルが出来たので、C30コンパイラで開発しました。
自作したAndroidアプリ側は、4チャンネル分のデーターを、16進数の文字コードとしてBluetooth通信で送っています。
今回、改造したSBDBTのファームウェアでは、Bluetooth通信で16進数の文字コードを受信し、処理しています。
受信した文字コードを、2進数に変換したり、整数に変換する処理が必要ですが、最初、C言語の標準関数を利用したところ、C30コンパイラで作成したHEXファイルを書き込んで動作させると、Bluetooth通信が停止し、原因不明で動作しませんでした。結局、標準関数は利用せず、変換用の関数を自作しました。
動き始めた FETのゲート信号をロジックアナライザーで観測すると、ON、OFFを19回繰り返して494μSの変調波形を作成する部分で、他の処理が割込み、おかしな波形となっていました。(494μSの後のOFF状態の時間も、他の処理が割込み、時々おかしな時間となっていました)
4チャンネル分のデーターを、赤外線出力している間は、他の割込み動作の禁止が必要ですが、禁止した場合、Bluetooth通信に問題が発生するかと心配しました。
しかし、実際に、赤外線出力中の、割込み禁止のプログラムに改造したところ、問題は発生しませんでした。
ロジックアナライザーでの観測波形も正常となり、Bluetooth通信状態も安定しています。パルスチェッカの値も正常になりました。
今回の改造では、C言語で約450行のソースコードを追加しましたが、PIC24FJ64GB004のプログラムメモリの使用率は、改造前72パーセントだったのが、81パーセントになりました。 まだ余裕があるので、更にいろいろな改造が可能なようです。
Bluetoothで操縦
(
toko
)
2013-03-01 14:07:53
Kineさん、Bluetooth→赤外線でインドアプレーンを飛ばすんですね!
BluetoothをつかえばAndroid端末に余分なものをつながないで操縦できるということですね。素晴らしい!
実際に見てみたいですね。
インドアのヘリコプター
(
Kine
)
2013-03-03 14:13:45
私は、ラジコンのエンジン機とグライダーの経験者ですが、インドアのヘリコプターに興味がありプログラム開発を進めています。
送信機については、何十年も前のラジコン送信機の基板を取り外し、自作プログラムのPIC回路を組込みました。
自作プログラムは、C言語で作成していたので、今回のSBDBTのファームウェア改造に利用しました。
余談ですが、ラジコン送信機から取り外した基板は、トランジスタ回路で組まれています。スティックのボリュームの位置に対応したパルス幅を作成するのに、
チャンネルひとつに対し、ひとつのトランジスタ回路で組まれています。
初期の頃のラジコン送信機は、とてもシンプルな回路でパルス幅を作成していたことに驚きです。
インドアのヘリコプターについては、いろいろな方がブログなどで、メインローターの軸に小さなモーターを取付け、ピッチコントロールを行う方式が紹介されています。
このピッチコントロールのプログラムは公開されていないようなので、自分なりに考えC言語で作成中です。
メインローターの軸に取り付けた磁石の位置を、センサーで検出し、ローターが1回転する事にPIC12F683に割込みをかけカウンターをリセットすることで、カウンターの値からローターの実際の回転数と、回転角度を管理する処理としました。また、エルロンとエレベーターのスティック位置に対応するピッチコントロールを行う為、ローターの回転角度に応じて、メインローターの軸に取り付けた小さなモーターをPWM制御する処理としました。
この作成中のものは、ブレッドボード上に、赤外線受光素子、PIC12F683、FET回路などを組み、ヘリコプターが飛び上がらないようにピアノ線で固定してます。
このプログラムは、ほぼ出来上がり、実際に飛ばして調整を進める予定です。
実際に飛ばすヘリコプターについては、まだ出来上がっていません。
私は、年齢50歳代ですが、小さな部品のハンダ付けには自信があったのですが、最近、急激に老眼となりフラットパッケージの部品のハンダ付けに苦労し、なかなか組立てが進んでいません。
従って、今回のSBDBTのファームウェアの改造では、実際にAndroid端末で、Bluetooth通信を通し、赤外線対応のインドアプレーンを操縦する確認には至っていません。
ブレッドボード上に組んだ、飛び上がらないヘリコプターは、Android端末から操作出来ました。
私の手持ちの、CCP社の4ch赤外線ヘリコプターは、24g程です。
海外のサイトで、Blade Nano CP X という 29g のヘリコプターの、一般家庭の室内での背面飛行などの3D曲技飛行を紹介していました。
29g でこれほどの力強い飛行が出来るのがわかったので、今回作成中のBluetooth通信のSBDBT基板をヘリコプターに搭載し、赤外線を使用せずに、Android端末から直接Bluetooth通信でヘリコプターを操縦するプログラムと、自作ヘリコプターの開発を進めたいと考えています。(3D曲技飛行は無理ですが、狭い室内でも自由に飛ばす事を目標にしたいと考えています)
間もなく飛行出来そうですね
(
toko
)
2013-03-04 18:41:50
Kineさんいよいよですね。
家の中で飛ばすならBluetooth受信機を直接ヘリに載せるのもよさそうですね。
経過報告を楽しみにしています。
コメントを投稿する
名前
タイトル
URL
コメント
※絵文字はjavascriptが有効な環境でのみご利用いただけます。
▼ 絵文字を表示
携帯絵文字
リスト1
リスト2
リスト3
リスト4
リスト5
ユーザー作品
▲ 閉じる
コメント利用規約
に同意の上コメント投稿を行ってください。
コメント利用規約に同意する
数字4桁を入力し、投稿ボタンを押してください。
でんき予報
Twitter
Facebook
MY BOOK 2
この本をAMAZONで購入
MY BOOK
この本をAMAZONで購入
BOOK STORE
関連書籍のお求めは
こちらから
携帯
ENTRY ARCHIVE
2024年10月
2024年09月
2024年08月
2024年07月
2024年06月
2024年05月
2024年04月
2024年03月
2024年02月
2024年01月
2023年12月
2023年11月
2023年10月
2023年09月
2023年07月
2023年06月
2023年05月
2023年04月
2023年03月
2023年02月
2023年01月
2022年11月
2022年10月
2022年09月
2022年08月
2022年07月
2022年06月
2022年05月
2022年04月
2022年01月
2021年12月
2021年11月
2021年09月
2021年08月
2021年06月
2021年05月
2020年12月
2020年08月
2020年07月
2020年06月
2020年02月
2020年01月
2019年12月
2019年11月
2019年10月
2019年09月
2019年08月
2019年07月
2019年06月
2019年05月
2019年04月
2019年03月
2019年02月
2019年01月
2018年12月
2018年11月
2018年09月
2018年08月
2018年06月
2018年05月
2018年03月
2018年02月
2017年12月
2017年11月
2017年10月
2017年08月
2017年07月
2017年06月
2017年05月
2017年04月
2017年03月
2017年02月
2017年01月
2016年12月
2016年11月
2016年10月
2016年09月
2016年08月
2016年07月
2016年06月
2016年05月
2016年04月
2016年03月
2016年02月
2016年01月
2015年12月
2015年11月
2015年10月
2015年09月
2015年08月
2015年07月
2015年06月
2015年05月
2015年04月
2015年03月
2015年02月
2015年01月
2014年12月
2014年11月
2014年10月
2014年09月
2014年08月
2014年07月
2014年06月
2014年05月
2014年04月
2014年03月
2014年02月
2014年01月
2013年12月
2013年11月
2013年10月
2013年09月
2013年08月
2013年07月
2013年06月
2013年05月
2013年04月
2013年03月
2013年02月
2013年01月
2012年12月
2012年11月
2012年10月
2012年09月
2012年08月
2012年07月
2012年06月
2012年05月
2012年04月
2012年03月
2012年02月
2012年01月
2011年12月
2011年11月
2011年10月
2011年09月
2011年08月
2011年07月
2011年06月
2011年05月
2011年04月
2011年03月
2011年02月
2011年01月
2010年12月
2010年11月
2010年10月
2010年09月
2010年08月
2010年07月
2010年06月
2010年05月
2010年04月
2010年03月
2010年02月
2010年01月
2009年12月
2009年11月
2009年10月
2009年09月
2009年08月
2009年07月
2009年06月
2009年05月
2009年04月
2009年03月
2009年02月
2009年01月
2008年12月
2008年11月
2008年10月
2008年09月
2008年08月
2008年07月
2008年06月
2008年05月
2008年04月
2008年03月
2008年02月
2008年01月
2007年12月
2007年11月
2007年10月
2007年09月
2007年08月
2007年07月
2007年06月
2007年05月
2007年04月
2007年03月
2007年02月
2007年01月
2006年12月
2006年11月
2006年10月
2006年09月
2006年08月
2006年07月
2006年06月
2006年05月
2006年04月
2006年03月
2006年02月
2006年01月
2005年12月
2005年11月
2005年10月
2005年09月
2005年08月
2005年07月
2005年06月
2005年05月
2005年04月
2005年03月
2005年02月
2005年01月
2004年12月
2004年11月
2004年10月
ブログの作成・編集
gooメール









今回の改造は、tokoさんのパルス幅を変化させる方式の、赤外線出力プログラムの追加です。
ブレッドボード上の SBDBTの出力に、FETと抵抗器と赤外線LEDを取付けました。
出力している赤外線の確認には、tokoさんのパルスチェッカを利用しました。
また、ブレッドボード上の FETのゲート端子には、ロジックアナライザーを接続し波形を観測しています。
前回の投稿で、開発環境は、MPLAB IDE Xバージョンと記しましたが、以前のV8バージョンと比べると、操作方法が全く違い、使い勝手が悪いので、以前のV8バージョンで開発しました。
また、前回、Cコンパイラは、XC16で、HEXファイルが出来たと記しましたが、内容をエディタで見ると、購入時に書込まれているファームウェアとは、違いました。 XC16をC30コンパイラに変更しビルドすると、購入時と同じ内容のHEXファイルが出来たので、C30コンパイラで開発しました。
自作したAndroidアプリ側は、4チャンネル分のデーターを、16進数の文字コードとしてBluetooth通信で送っています。
今回、改造したSBDBTのファームウェアでは、Bluetooth通信で16進数の文字コードを受信し、処理しています。
受信した文字コードを、2進数に変換したり、整数に変換する処理が必要ですが、最初、C言語の標準関数を利用したところ、C30コンパイラで作成したHEXファイルを書き込んで動作させると、Bluetooth通信が停止し、原因不明で動作しませんでした。結局、標準関数は利用せず、変換用の関数を自作しました。
動き始めた FETのゲート信号をロジックアナライザーで観測すると、ON、OFFを19回繰り返して494μSの変調波形を作成する部分で、他の処理が割込み、おかしな波形となっていました。(494μSの後のOFF状態の時間も、他の処理が割込み、時々おかしな時間となっていました)
4チャンネル分のデーターを、赤外線出力している間は、他の割込み動作の禁止が必要ですが、禁止した場合、Bluetooth通信に問題が発生するかと心配しました。
しかし、実際に、赤外線出力中の、割込み禁止のプログラムに改造したところ、問題は発生しませんでした。
ロジックアナライザーでの観測波形も正常となり、Bluetooth通信状態も安定しています。パルスチェッカの値も正常になりました。
今回の改造では、C言語で約450行のソースコードを追加しましたが、PIC24FJ64GB004のプログラムメモリの使用率は、改造前72パーセントだったのが、81パーセントになりました。 まだ余裕があるので、更にいろいろな改造が可能なようです。
BluetoothをつかえばAndroid端末に余分なものをつながないで操縦できるということですね。素晴らしい!
実際に見てみたいですね。
送信機については、何十年も前のラジコン送信機の基板を取り外し、自作プログラムのPIC回路を組込みました。
自作プログラムは、C言語で作成していたので、今回のSBDBTのファームウェア改造に利用しました。
余談ですが、ラジコン送信機から取り外した基板は、トランジスタ回路で組まれています。スティックのボリュームの位置に対応したパルス幅を作成するのに、
チャンネルひとつに対し、ひとつのトランジスタ回路で組まれています。
初期の頃のラジコン送信機は、とてもシンプルな回路でパルス幅を作成していたことに驚きです。
インドアのヘリコプターについては、いろいろな方がブログなどで、メインローターの軸に小さなモーターを取付け、ピッチコントロールを行う方式が紹介されています。
このピッチコントロールのプログラムは公開されていないようなので、自分なりに考えC言語で作成中です。
メインローターの軸に取り付けた磁石の位置を、センサーで検出し、ローターが1回転する事にPIC12F683に割込みをかけカウンターをリセットすることで、カウンターの値からローターの実際の回転数と、回転角度を管理する処理としました。また、エルロンとエレベーターのスティック位置に対応するピッチコントロールを行う為、ローターの回転角度に応じて、メインローターの軸に取り付けた小さなモーターをPWM制御する処理としました。
この作成中のものは、ブレッドボード上に、赤外線受光素子、PIC12F683、FET回路などを組み、ヘリコプターが飛び上がらないようにピアノ線で固定してます。
このプログラムは、ほぼ出来上がり、実際に飛ばして調整を進める予定です。
実際に飛ばすヘリコプターについては、まだ出来上がっていません。
私は、年齢50歳代ですが、小さな部品のハンダ付けには自信があったのですが、最近、急激に老眼となりフラットパッケージの部品のハンダ付けに苦労し、なかなか組立てが進んでいません。
従って、今回のSBDBTのファームウェアの改造では、実際にAndroid端末で、Bluetooth通信を通し、赤外線対応のインドアプレーンを操縦する確認には至っていません。
ブレッドボード上に組んだ、飛び上がらないヘリコプターは、Android端末から操作出来ました。
私の手持ちの、CCP社の4ch赤外線ヘリコプターは、24g程です。
海外のサイトで、Blade Nano CP X という 29g のヘリコプターの、一般家庭の室内での背面飛行などの3D曲技飛行を紹介していました。
29g でこれほどの力強い飛行が出来るのがわかったので、今回作成中のBluetooth通信のSBDBT基板をヘリコプターに搭載し、赤外線を使用せずに、Android端末から直接Bluetooth通信でヘリコプターを操縦するプログラムと、自作ヘリコプターの開発を進めたいと考えています。(3D曲技飛行は無理ですが、狭い室内でも自由に飛ばす事を目標にしたいと考えています)
家の中で飛ばすならBluetooth受信機を直接ヘリに載せるのもよさそうですね。
経過報告を楽しみにしています。